Internal velocity filters
Function description 37
Version: 1.5
8.2 1st and 2nd order IIR filter – Infinite Impulse Response
Filter
A general digital filter with time-discrete transfer function has been implemented for the current command
value filter.
The following filters can be selected in the TCDriveManager:
• Notch filter
• Phase correction filter 1
st
order (PD T1 or lead lag)
• Low-pass filter 1
st
order (PT1)
• Phase correction filter 2
nd
order (Bi Quad)
• Low-pass filter 2
nd
order (PT2)
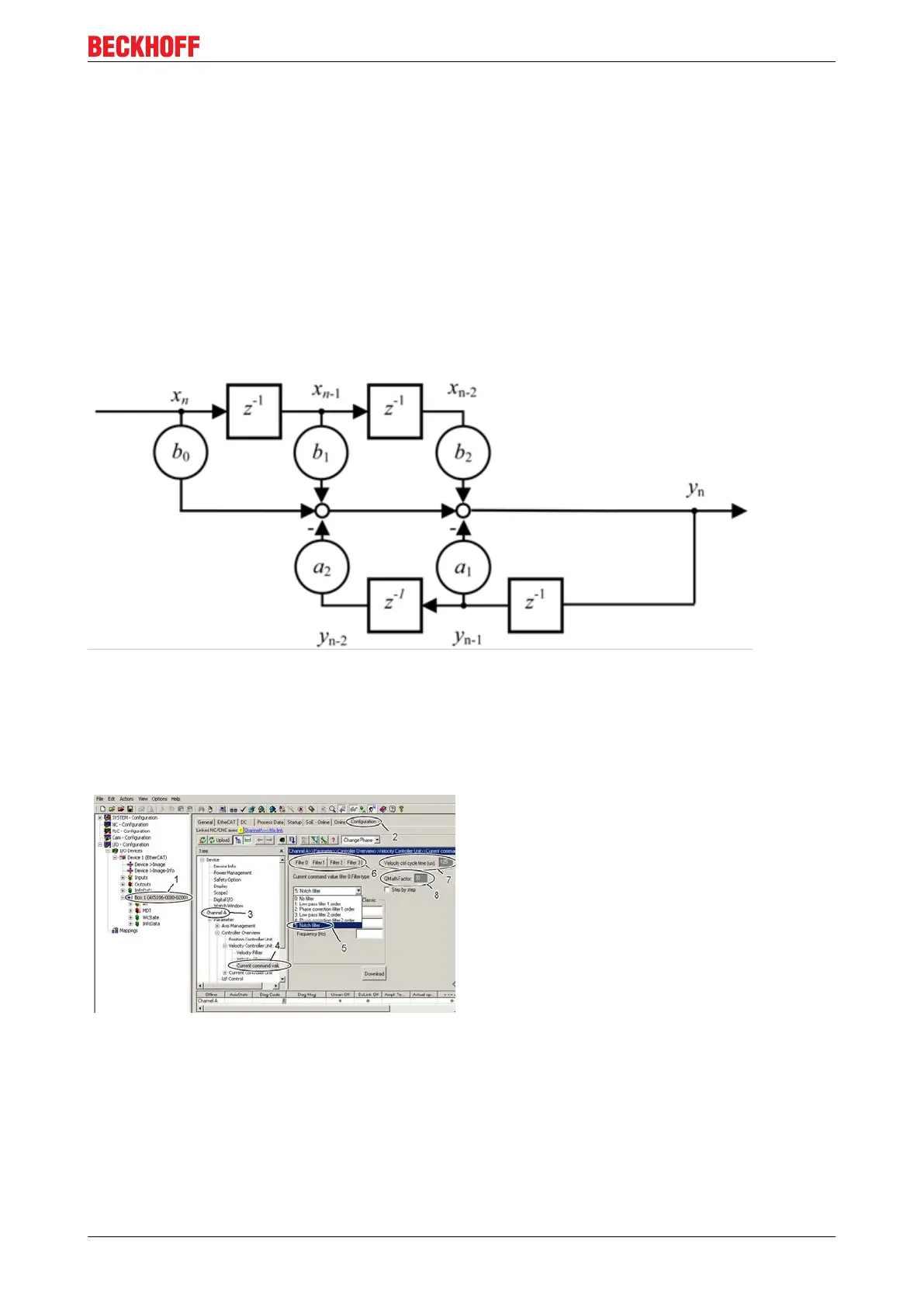
The coefficients b
0
, b
1
, b
2
, and a
1
, a
2
determine the characteristic of all the filters described and can also be
directly specified.
8.3 Notch filter (band-stop filter)
The notch filter is designed as a narrow-band filter for
the attenuation of resonance frequencies. Select a
servo drive (1) in the TwinCAT System Manager,
start the TCDriveManager (2), click on the respective
axis (3) and select the "Current command value
filter" (4).
A maximum of four filters are evaluated, which can be
parameterised independently of one another. In area
(6), activate the filter that you would like to occupy
with the notch filter. The cycle time of the velocity
controller is indicated in field (7). The "QMath
Factor" (8) determines the scaling of the filter input
parameter. With the current filter implementation the
maximum possible resolution is achieved with the
default value "30".
Now select "Notch filter" (5) from the drop-down
menu.

 Loading...
Loading...



