Modulo
Function description 51
Version: 1.5
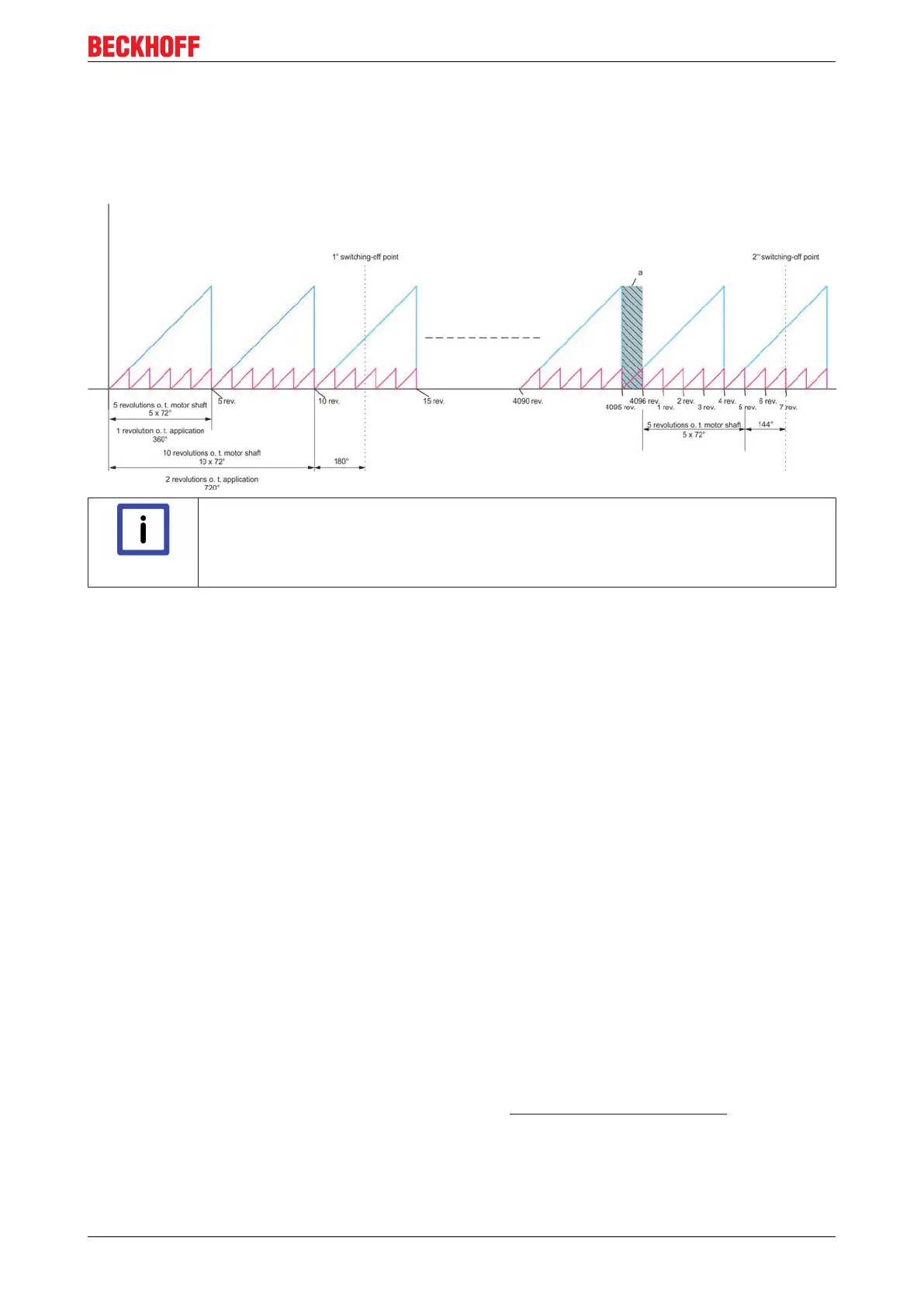
taken into account the revolution in the range (a) and displays 7 motor revolutions, but only 1 application
revolution + 144°; one motor revolution (72°) is missing. This problems occurs every 4096 motor revolutions
and keeps growing by one motor revolution. In order to be able to determine the correct application position,
the overruns or the resulting position offset must be stored on the application side. This requirement
necessitates the use of the UPS mentioned at the start, so that this can be guaranteed even in the case of a
power failure.
Note
Selecting the gear unit!
If a gear unit with a transmission ratio of 2
x
is selected, the zero points of the motor revolu-
tion and the overrun of the absolute value encoder coincide. The above behavior does not
occur.
11.2 Operation with modulo
In the case of operation with a modulo, the following properties are brought to bear:
1. The range of the multi-turn encoder is subdivided into four large ranges
ð Range of the multi-turn encoder = 4096 revolutions
ð One quarter range = 1024 revolutions
2. Saving procedure
ð On each transition from one quarter range to another, the modulo data set is modified and saved in
the servo drive (real position and CRC)
ð The servo drive always has two modulo data sets saved. These data sets are used in alternation.
ð A modulo data set is also saved if the EtherCAT state changes from SaveOP to PreOP.
3. Power-on procedure
ð Both modulo data sets are read if the EtherCAT transition changes from Boot to Init. The last valid
data set is used to reconstruct the modulo position.
4. Power supply error (uncontrolled voltage drop of the 24 V supply)
ð Under certain circumstances it may no longer be possible to save a data set because the 24 V
supply has been interrupted. Because two data sets exist at all times, however, one of them is valid
and can be used to reconstruct the modulo position at the next power-on.
5. Maximum speed during operation with modulo
ð Since the saving of the modulo data sets in an internal persistent memory in the AX5000 cannot take
place at an infinitely fast speed, the motor speed is limited. An example of the calculation of the
maximum possible speed can be found in the section Maximum possible speed
[}55].
 Loading...
Loading...




