Motor types and operation modes
Function description62
Version: 1.5
Functionality from firmware v2.06 to firmware v2.10
The firmware versions v2.06 - v2.10 allow the operation of synchronous servomotors with feedback and
asynchronous servomotors without feedback.
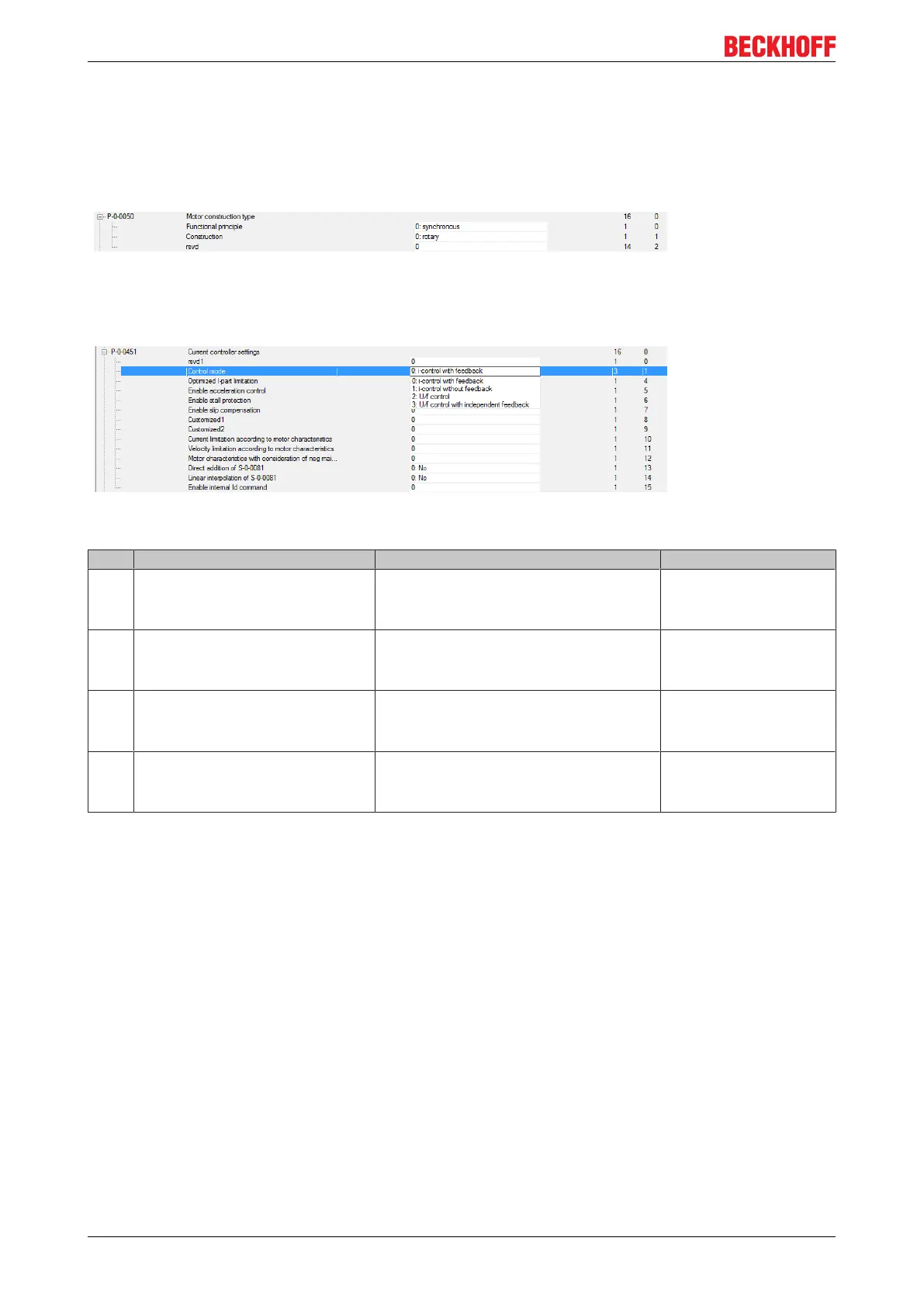
Structure of the parameter P-0-0050 (Motor construction type)
The functional principle of
the motor
(asynchronous/synchro-
nous) and the type of con-
struction (rotary/linear) are
defined in this parameter.
Structure of the parameter P-0-0451 (Current controller settings)
In Control mode the opera-
tion mode is selected in rela-
tion to the predetermined
motor type (P-0-0050).
Please refer to the
table below for
the relationships.
Relationships between motor type and operation mode
Case Motor type Settings in P-0-0050 Settings in P-0-0451
1 Rotary synchronous servomotor with feed-
back
Functional principle = 0: synchronous
Construction = 0: rotary
Functional principle replacement = 0 (Default)
Control mode = 0: Field-ori-
ented current control with
feedback
2 Linear synchronous servomotor with feed-
back
Functional principle = 0: synchronous
Construction = 1: linear
Functional principle replacement = 0 (Default)
Control mode = 0: Field-ori-
ented current control with
feedback
3 Rotary asynchronous servomotor without
feedback
Functional principle = 0: synchronous
Construction = 0: rotary
Functional principle replacement = 0 (Default)
Control mode = 4: Field-ori-
ented current control without
feedback
4 Rotary asynchronous servomotor with
feedback
Functional principle = 1: asynchronous
Construction = 0: rotary
Functional principle replacement = 0 (Default)
Control mode = 0: Field-ori-
ented current control with
feedback

 Loading...
Loading...



