120 | © Danfoss | August 2018 AQ00000211
GPS v2:
If the max WA and cylinder size are known.
Suitable for larger series of machines, where different applications or tire dimensions will result in different
lock stop settings.
When the wheel angle cal. can estimate the max WA and cylinder size at calibration time, the curvature
command to wheel angle conversion will be accurate and system gain will also stay the same.
If machines where lock stops are changed also in field, the max WA and cylinder size must be known, to use
this method. With this method there will not be adverse effects in guidance performance, due to changes in
geometry.
In both modes the WA should be re-calibrated if lock stops are changed, for diagnostic purposes.
Further details see chapter 12.6 and 12.6
Important
Changing GPS algorithm type, may result in that gain parameters in section 12.5 Vehicle speed dependent closed loop
control needs to be adjusted.
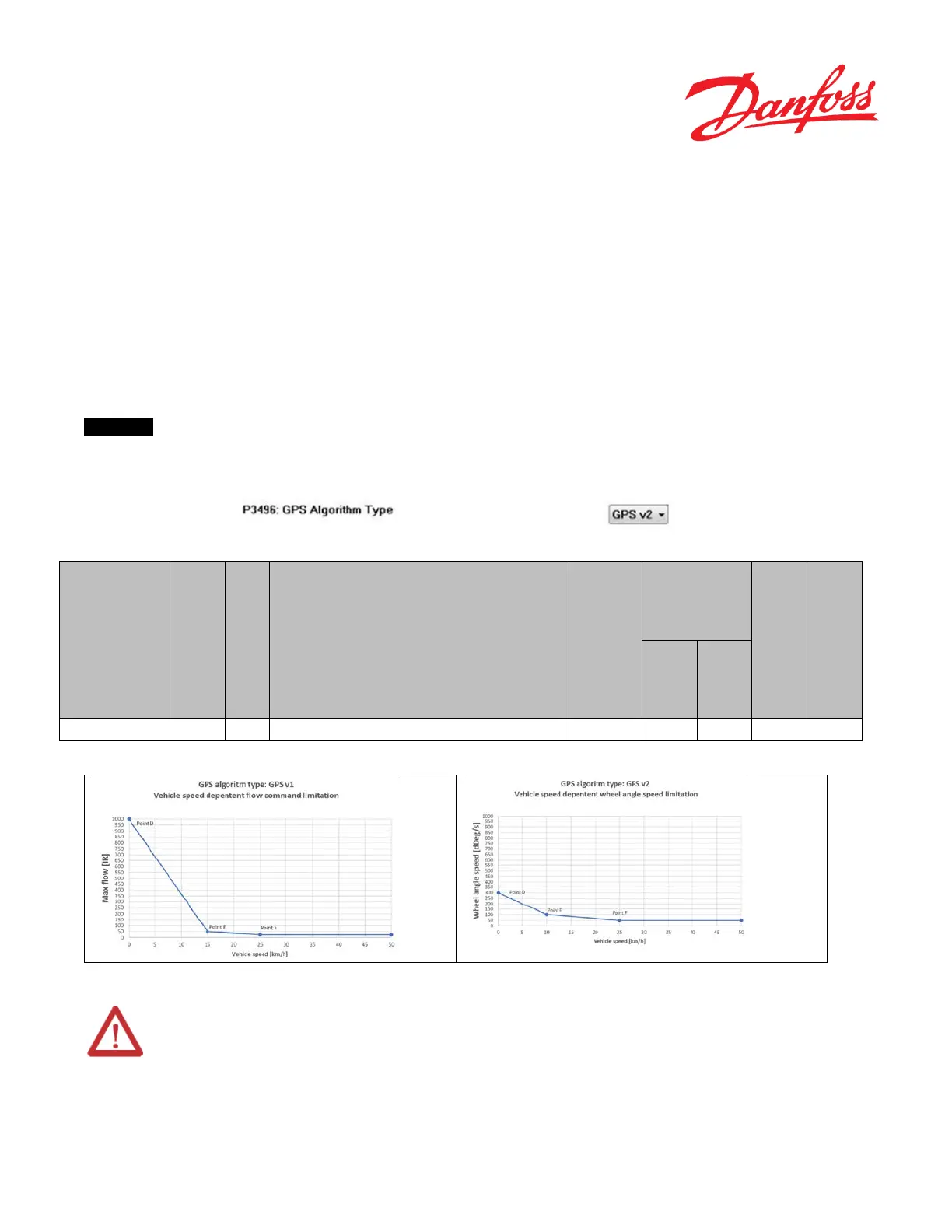
Figure 64
Name
Description of parameter
Range
Safety critical
parameters ‘S’
GPS – Algorithm type P3496 U16
Vehicle speed dependent flow limitation value = 0 => GPS v1
Vehicle speed dependent wheel angle speed limitation = 1 => GPS v2
OEM 0 1 0 S
Table 53
Figure 65
Warning
As parameter address is identical for GPS algorithm type v1 and v2, parameters values must accordingly be
adjusted to meet application requirement, when the GPS algorithm type is changed

 Loading...
Loading...









