© Danfoss | August 2018 AQ00000211 | 177
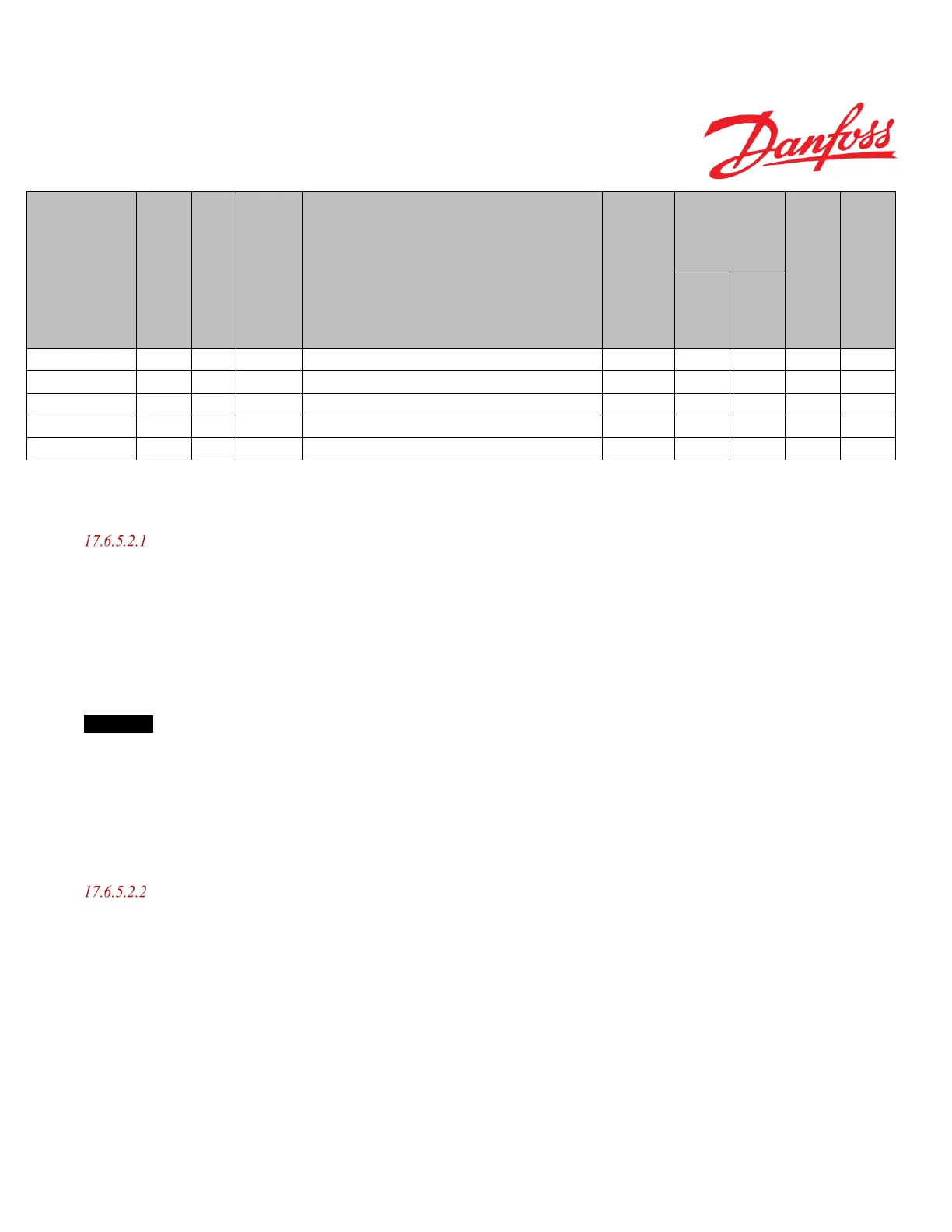
Name
Description of parameter
Range
Safety critical
parameters ‘S’
Max spool position, left P3162 S16 x10u Meter Spool left most position OEM, Dealer -1000 -300 -420
Max spool position,
right
P3164 S16 x10u Meter Spool right most position OEM, Dealer 300 1000 420
Closed loop dead-band
edge, left
P3166 S16 x10u Meter Spool closed loop dead-band edge, Left OEM, Dealer -300 0 -105
Closed loop dead-band
edge, right
P3168 S16 x10u Meter Spool closed loop dead-band edge, Right OEM, Dealer 0 300 105
Open loop dead-band
edge offset
P3170 S16 x10u Meter Spool open loop dead-band offset OEM, Dealer 0 150 25
Table 88
17.6.5.2 Spool calibration procedure
Determining the closed loop dead-bands
The principle in this calibration procedure is to determine the closed-loop mode dead-bands first. The closed-loop dead-
bands are defined as the slowest possible steered wheel movement speed that is used for controlling the smallest possible
wheel angle position error (proportional control). Once the closed-loop dead-bands are determined (P3166 and P3168),
the open-loop dead-bands are derived by subtracting an off-set (P3170) from the respective closed-loop mode dead-band
positions (P1 and P2 from Figure 68)
The following calibration procedure is based on balancing the time it takes to move between two fixed wheel angles by
adjusting two experimental spool position set-point values.
Important
The criteria which shall be evaluated for valve calibration are:
• The times to move from left to right and vice versa are equal (symmetry measure)
• The time to move from left to right and vice versa is sufficiently slow (minimum flow)
These above times depends on e.g. vehicle geometry, steering type, cylinder stroke volume, wheel angle sensor
calibration, valve capacity and requirements on minimum correction flows for closed-loop mode operation.
Determining the open loop dead-bands
When the closed-loop mode dead-bands are found, the open-loop dead-bands values (P1 and P2 from Figure 68) are set
by subtracting an offset (defined by parameter P3170) from the closed-loop dead-band values.
The criteria for having derived good open-loop dead-bands are:
• The valve shall not steer out any flow and therefore the steered wheel shall not exhibit movement jitter when no
steering activity takes place

 Loading...
Loading...









