130 | © Danfoss | August 2018 AQ00000211
12.7 VEHICLE SPEED DEPENDENT WHEEL ANGLE SPEED LIMITATION
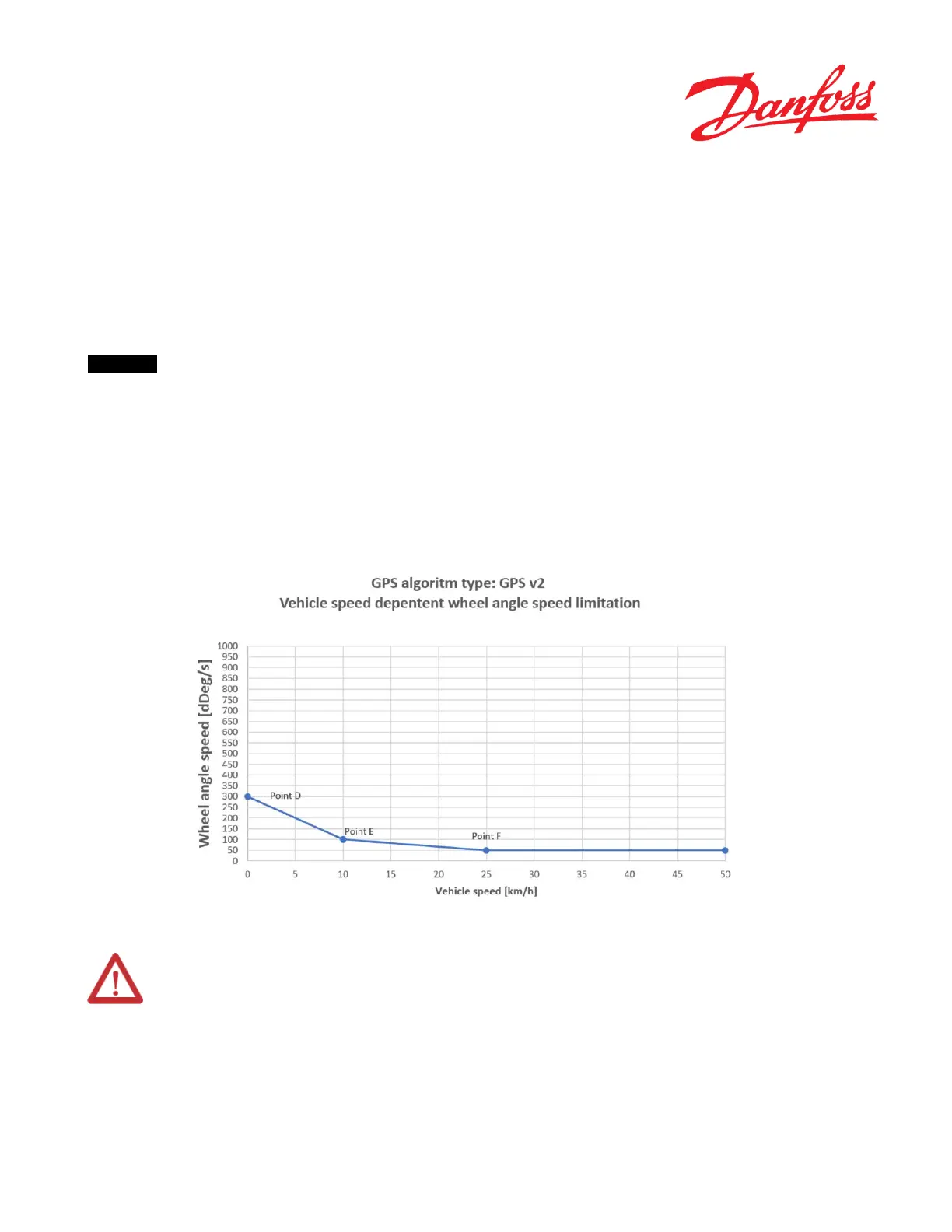
GPS algorithm type = GPS v2
Using the auto-guidance function, the PVED-CLS’s auto-guidance control algorithm can also limit the maximum allowed
wheel angle speed in proportion to the vehicle speed (i.e. the faster the vehicle goes the lower the maximum wheel angle
speed will be).
Speed range [km/h]: 0 to 100 for P3453 and P3457
Range [dDeg/s]: 0 to 1000 for P3451, P3455 and P3459
Important
This function applies to both GPS and GPS2.
These parameters represent the three points on the curve below (Point D, E and F). The auto-guidance algorithm will make
linear interpolation in between each of the three points. It is allowed to move the three points in any direction, limited by
the following rules:
• Point D is always specified at Vehicle speed limited flow = 0 km/h
• Point F “Max wheel angle speed” is valid for Point F and vehicle speeds above Point F
• Point D “Max wheel angle speed” ≥ Point E “Max wheel angle speed” ≥ Point F “Max wheel angle speed”
• Point F “Vehicle speed limited wheel angle speed” > Point E “Vehicle speed limited wheel angle speed” > Point
D “Vehicle speed limited wheel angle speed”
Figure 69
Warning
Failure to comply with the above rules may render this function inoperable or lead to undesirable steering
behavior!

 Loading...
Loading...









