FC 300 Design Guide
Introduction to FC 300
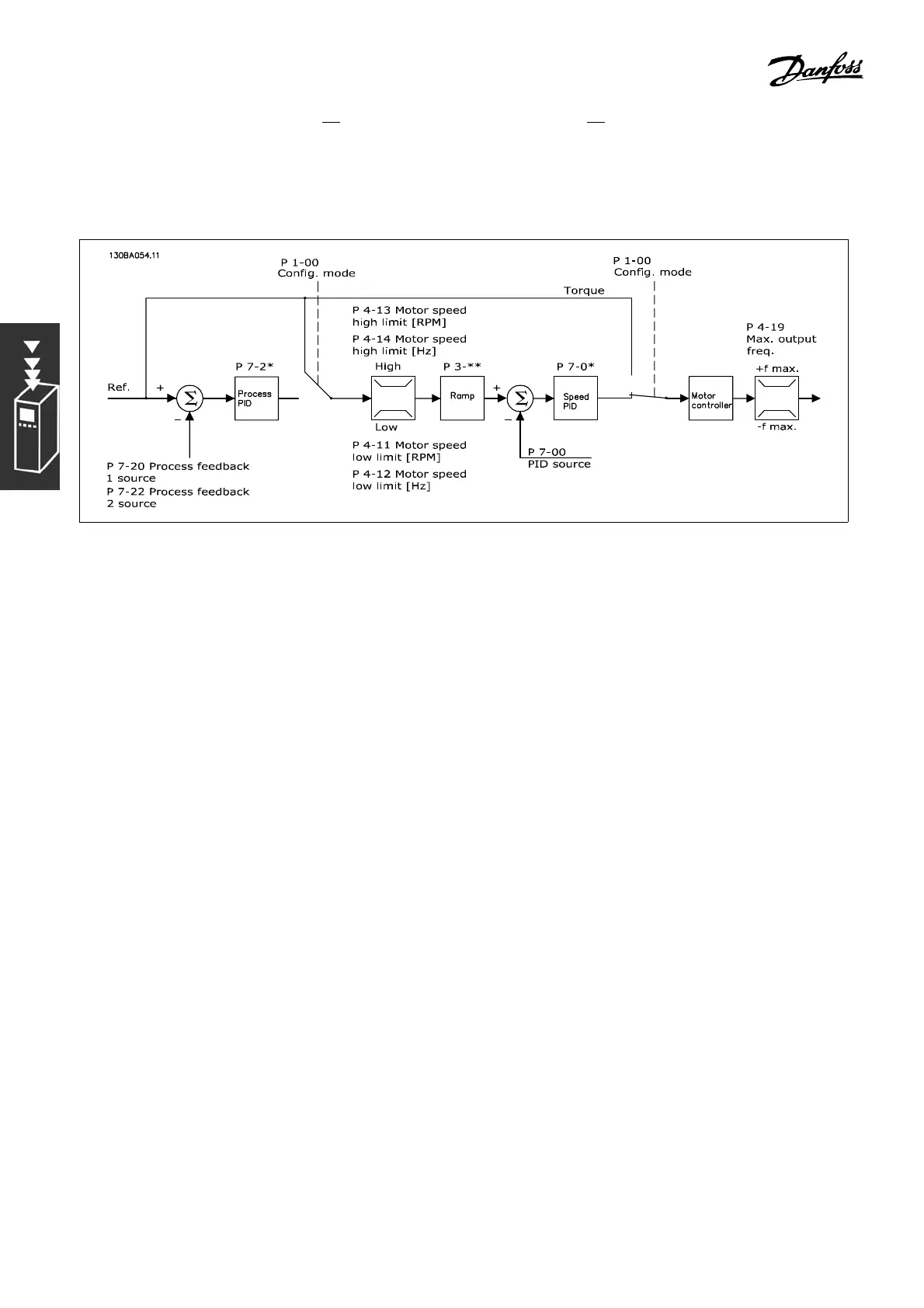
" Control Structure in F lux with Motor Feedback
Control structure in Flux with motor feedback configuration (only available in FC 302):
In the shown configuration, par. 1-01 Motor Control Principle is set to "Flux w encoder feedb
[3]" and par. 1 -00 is set to "Speed closed loop [1]".
The motor control in this configuration relies on a fe edb ack signal from an enco der mounted
directly on the motor (set in par. 1-02 Motor Shaft Encoder Source).
Select "Speed closed-loop [1]" in par. 1-00 to use the resulting reference as an input for the Speed
PID control. The Speed PID control parameters are located in par. group 7-0*.
Select"Torque[2]"inpar. 1-00tousetheresultingreference directly as a torque reference. Torque control
canonlybeselectedintheFlux with motor feedback (par. 1-01 Motor C ontrol Principle) configuration. When
this mode has been selected, the reference will use the Nm unit. It requires no torque feedback, since the
torque is calculated on the basis of the current measurement of the adjustable frequency drive. All parameters
are selected automatically on the basis of the set motor parameters in connection with torque control.
Select "Proces s [3]" in par. 1-00 to use the process PID control for closed-loop control of
e.g. speed or a process variable in the controlle d application.
22
MG.33.B3.22 - VLT is a registered Danfoss trademark
 Loading...
Loading...













