FC 300 Design Guide
Introduction to FC 300
The following tuning guidelines are relevant w hen using one of the Flux motor control principles in
applications where the load is mainly inertial (with a low amount of friction).
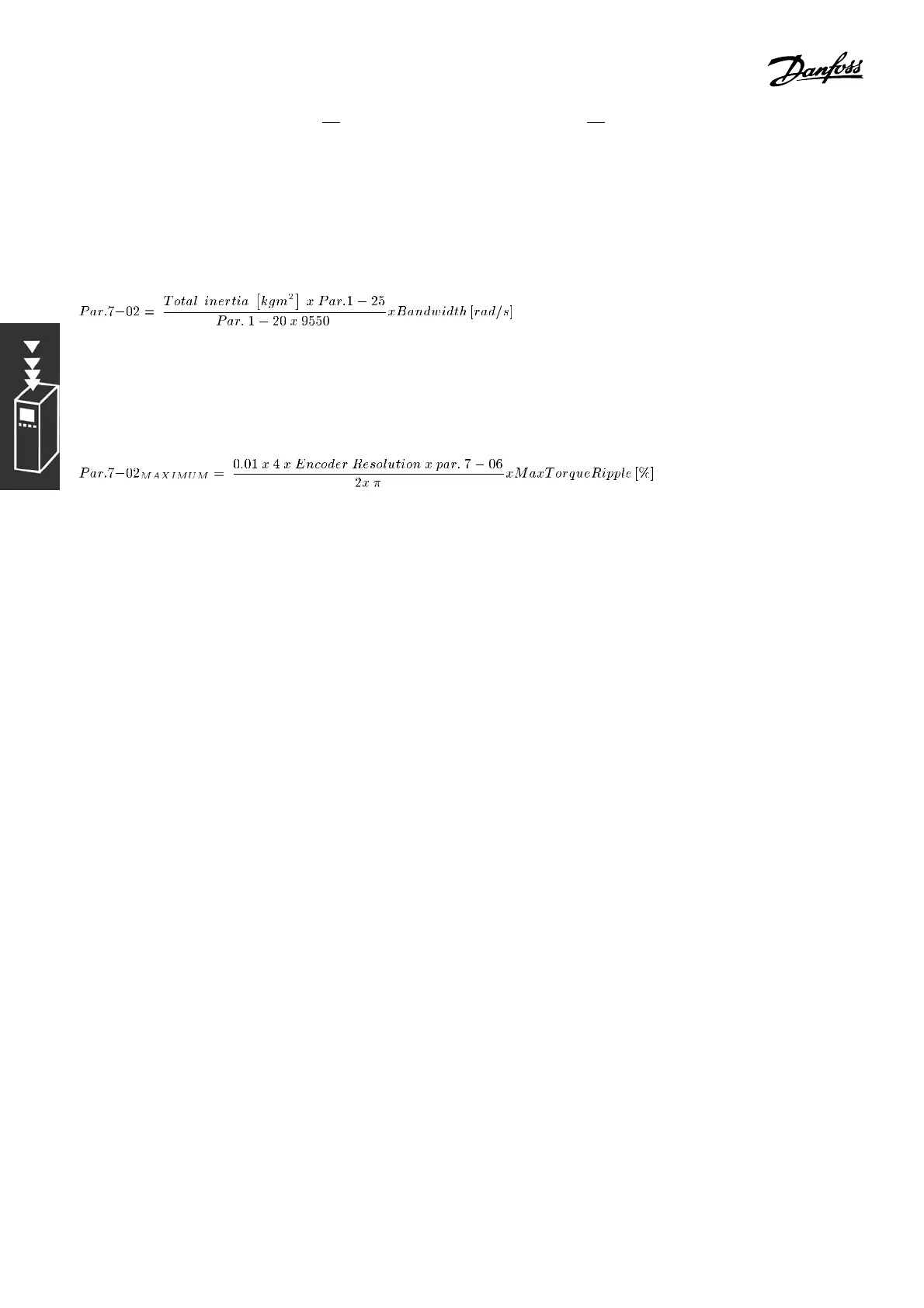
The value of par. 7-02 Speed P ID Proportional Gain is dependent on the combined iner tia of the m otor
and load, and the selected bandwidth can be calculated using the fol lowi ng formula:
Note: Par. 1-20 is the motor power in [kW] (i.e. enter ’4’ kW instead of ’4000’ W in the formula). A practical
value for the Bandwidth is 20 rad/s. Check the resu lt of the par. 7-02 calculation against the follow ing
formula (not required if you are using a high resolution feedbac k such as a SinCos or Resolver feedback):
A good start value for par. 7-06 Speed PID Lowp ass Filter Time is 5 ms (lower e ncode r resolution calls for a
higher filter value). Typically a MaxTorqueR ipp le of 3 % is acceptable. For incremental encoders, the Encoder
Resolution is found in either par. 5-70 (24V HTL on standard drive) or par. 17-11 (5V TTL on MCB102 Option).
Generally the practical maximum limit of par. 7-02 is determ ined by the encoder resolution and the fee dback
filter time but other factors in the application might limit par. 7-02 Speed PIDProportional Gain to a lower value.
To minimize overshoot, par. 7-03 Speed PIDIntegral Time could be set to ap-
prox. 2.5 s (varies with the application).
Par. 7-04 Speed PID Differentiation Time should be set to 0 until everything else is tuned. If necessary,
finish the tuning by experimenting with small increments of this setting.
36
MG.33.B3.22 - VLT is a registered Danfoss trademark
 Loading...
Loading...













