SV-DA200 series AC servo drive Function codes
-165-
EEPROM operation of
communication encoder
All the motor parameters can be written into the EEPROM and during the starting, the drive will
initialize the data of the relative parameters.
EEPROM data fault block of
communication encoder
This parameter can be used to block the no data and data error fault of encoder EEPROM.
If Er2-c or Er2-d occurs, set correct motor model and power on, the motor can be used after
re-power on, and then the drive will initialize relative parameters with motor data in EEPROM.
6.6 Program JOG, homing and PTP control (P5)
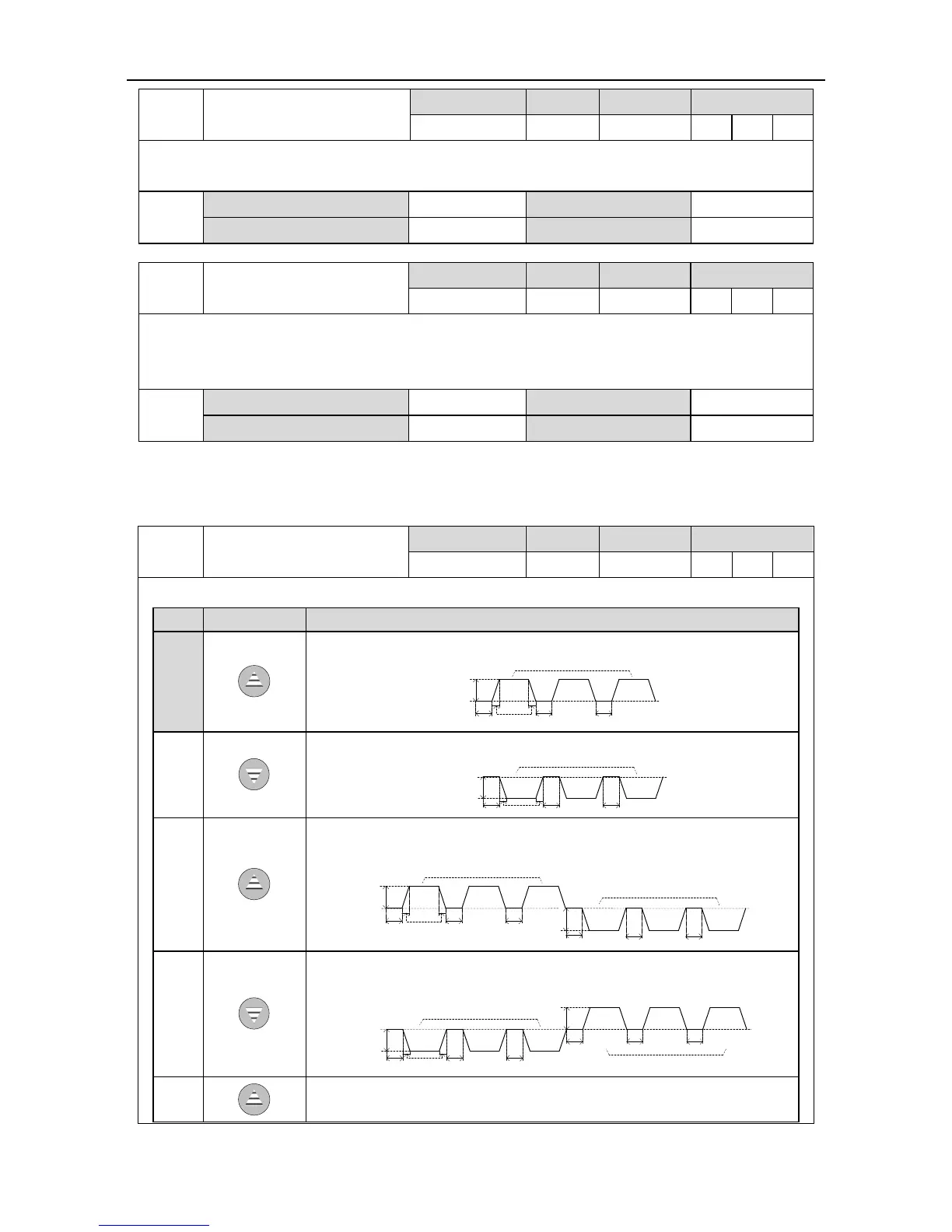
6.6.1 Program JOG
This parameter is used to set the JOG operation mode:
(waiting time P5.04→forward moving P5.01) × cycle time P5.05
P5.02
Speed 0
P5.04 P5.03 P5.04 P5.04
P5.05
P5.01 P5.01
P5.01
(waiting time P5.04→reverse moving P5.01) × cycle time P5.05
P5.02
Speed 0
P5.04 P5.04
P5.05
P5.01P5.01
P5.01
P5.03 P5.04
(waiting time P5.04→forward moving P5.01) × cycle time P5.05
→(waiting time P5.04→reverse movingP5.01) × cycle time P5.05
P5.02
Speed 0
P5.04 P5.03 P5.04 P5.04
P5.05
P5.01 P5.01
P5.01
P5.04 P5.04
P5.05
P5.01P5.01
P5.01
P5.04
P5.02
(waiting time P5.04→reverse moving P5.01) × cycle time P5.05
→(waiting time P5.04→forward movingP5.01) × cycle time P5.05
P5.02
P5.04 P5.04 P5.04
P5.05
P5.01 P5.01
P5.01
P5.02
Speed 0
P5.04 P5.04
P5.05
P5.01P5.01
P5.01
P5.03 P5.04
(waiting time P5.04→forward moving P5.01→waiting time P5.04
→reverse moving P5.01) × cycle time P5.05
 Loading...
Loading...
