SV-DA200 series AC servo drive Communication
-248-
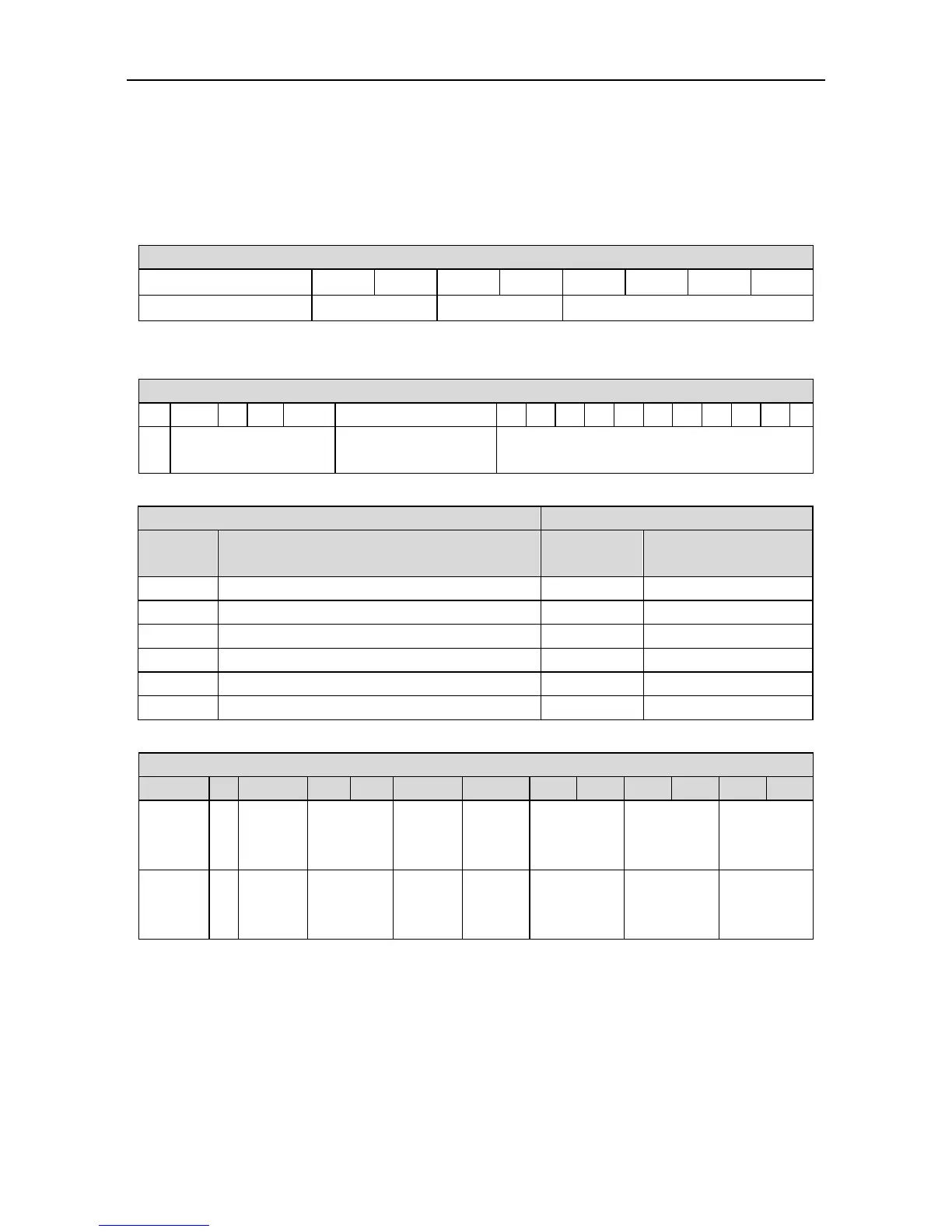
Of which, PKW is used for the transmission of non-cycle data for the configuration of drive
parameters and for the read-write operation. PZD is used in the transmission of cycle data, such as
control word, speed command, position command, torque command or state word, speed response,
position response, torque response; PZD data can be used for the data of transmission configuration
parameters.
PKW message format:
*
1
IND is the communication ID (the same as Modbus address), PWE is the parameter value.
Format of PKE message:
AK (task or response
identification ID)
Master station——> slave station
Slave station——> Master station
Write parameters(single word)
Write parameters(double word)
Write parameters(single word) save EE
Write parameters(double word) save EE
Configuration
setting
Parameter 1
Configuration
setting
Parameter 2
Configuration
setting
Parameter 3
Configuration
feedback
Parameter 1
Configuration
setting
Parameter 2
Configuration
setting
Parameter 3
*
1
the length of WORD is 16bit.
*
2
the fixed content of PZD is: the position command is P4.12; the speed command is P4.13; the
torque command is P4.14, the speed feedback is R0.21, the position feedback is R0.02 and the
torque feedback is R0.06.
 Loading...
Loading...
