SV-DA200 series AC servo drive Commissioning
-233-
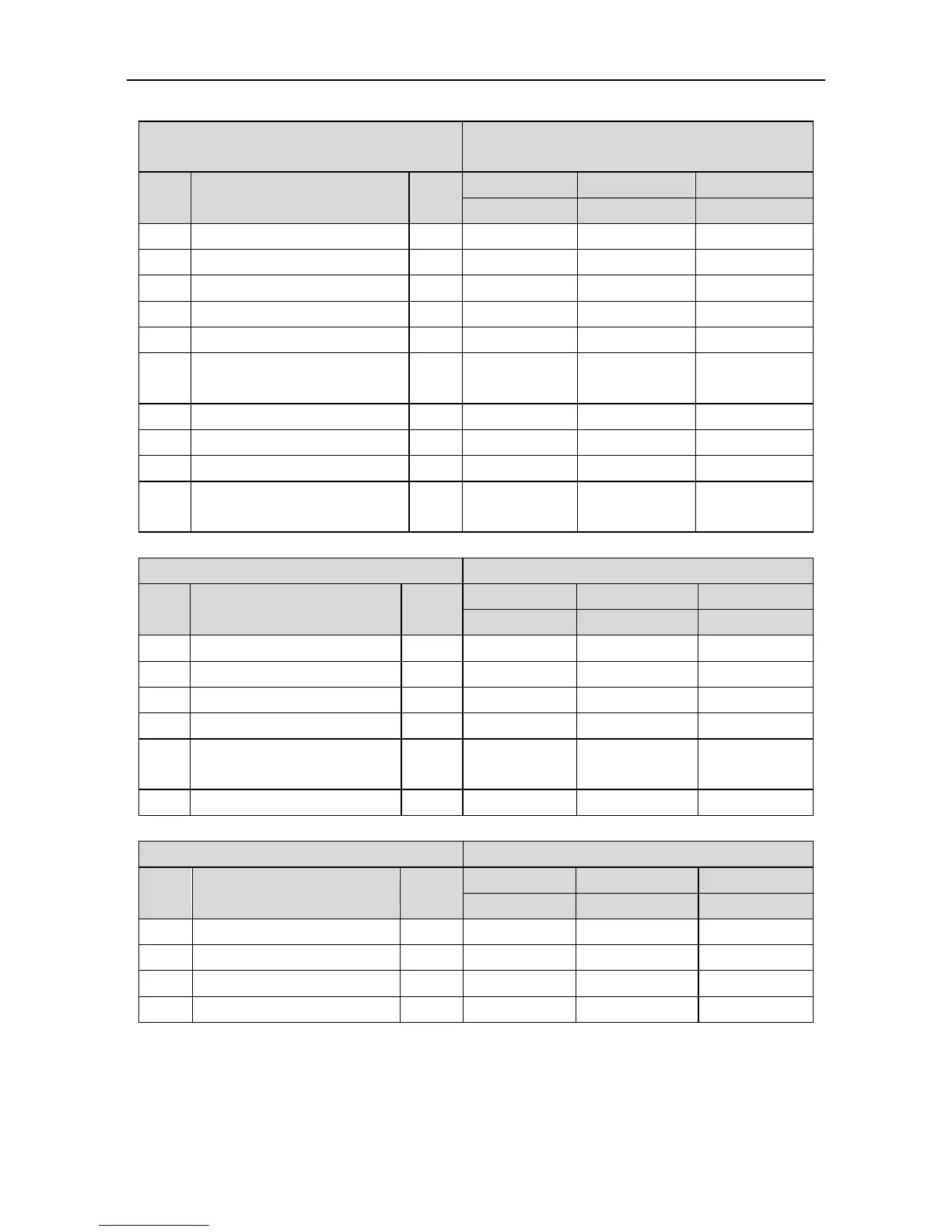
●Position control and fully-closed loop control (●: valid, —: invalid)
Condition setting of gain switching
Parameters setting of position control and
fully-closed loop control mode
Position deviation is large
With position command
+actual speed
Condition setting of gain switching
Parameters setting of speed control mode
With gain switching input
Speed command variation
quantity
Condition setting of gain switching
Parameters setting of torque control mode
With gain switching input
*
1
Delay time (P2.23, P2.28, P2.32) is only valid when 2
nd
gain to 1
st
gain
*
2
The definition of lag (P2.25, P2.30, P2.34) is shown as the figure below.
*
3
The encoder and external linear encoder can be designated in the control mode.
 Loading...
Loading...
