SV-DA200 series AC servo drive Commissioning
-227-
Gain of the position loop is too low
When we adjust the gain of the position loop to a low value, the motor speed follow-up position
command represents obvious lag and the positioning time is prolonged largely. The high accuracy
and high response performance of the positioning system are seriously affected.
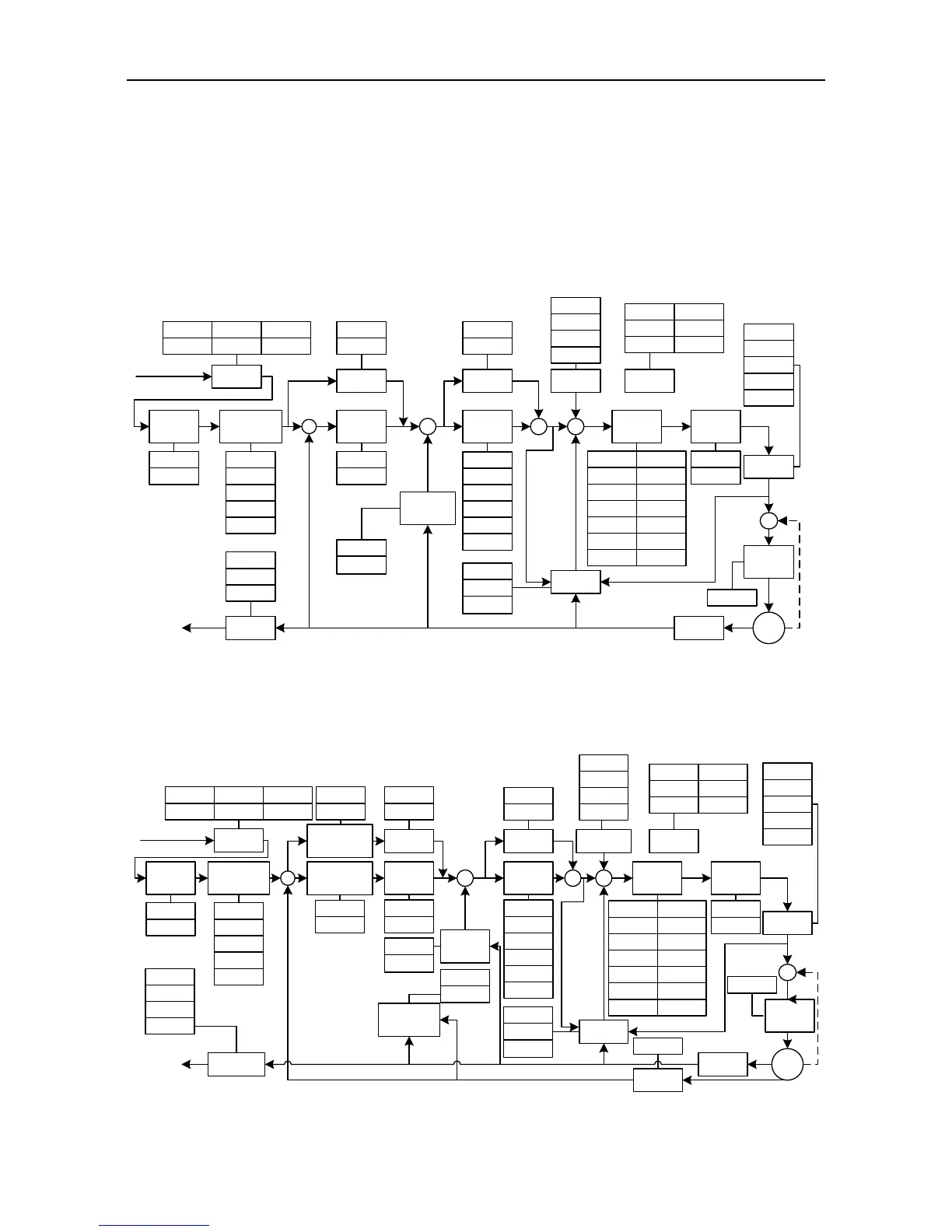
7.2.1 Gain adjustment of position mode
Semi-closed loop function
The position control diagram of the SV-DA200 series servo drive is shown in the figure below. The
gain parameters that can be adjusted in the position mode are marked out on the block diagram.
Fully-closed loop function
When P0.38 [fully-closed loop enable] of SV-DA200 series servo drive is set to 1, the control diagram
is shown as below. The gain parameters that can be adjusted are marked out in the diagram.
 Loading...
Loading...
