SV-DA200 series AC servo drive Appendix
-287-
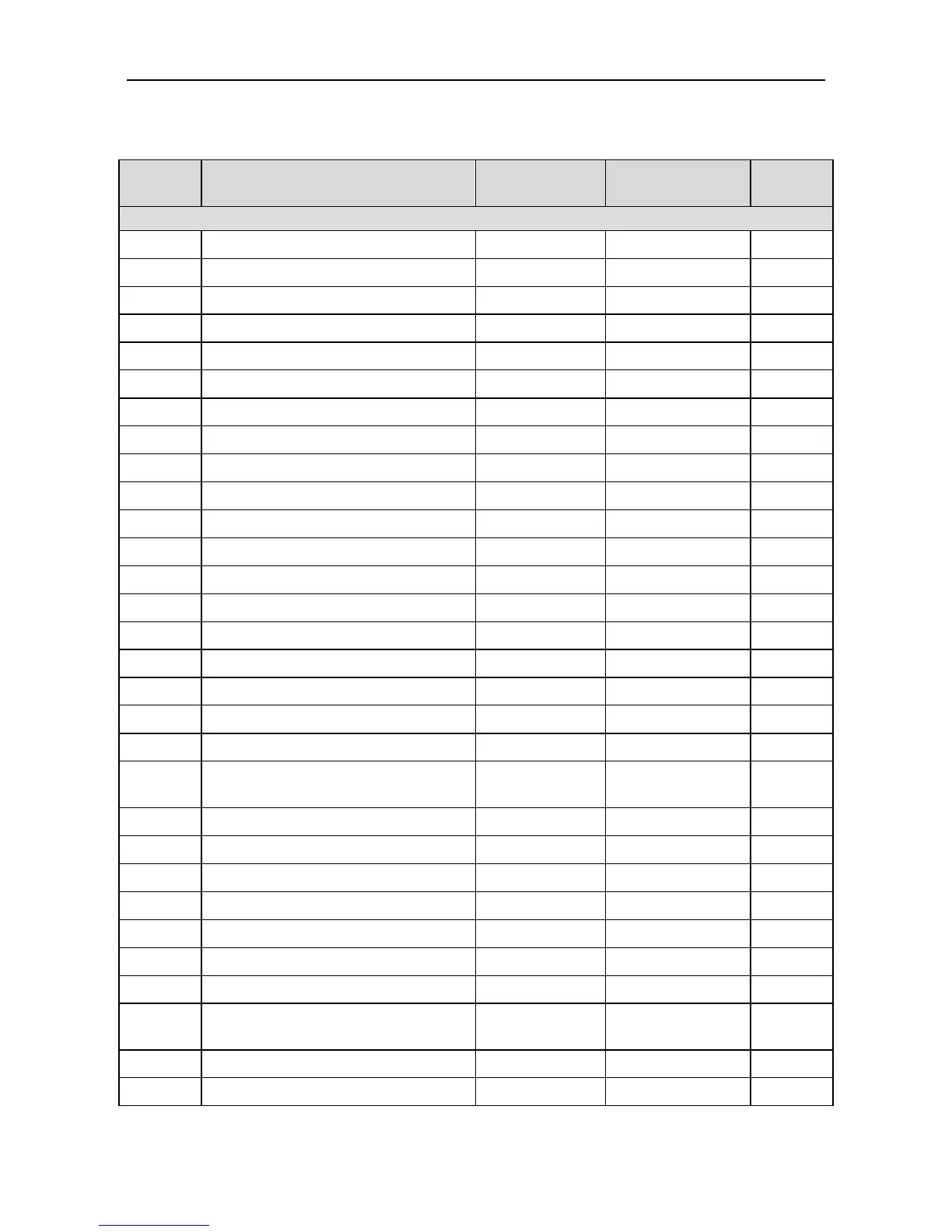
10.2 Monitoring parameter table
The state monitoring parameter of the servo drive is shown below:
R0 System monitoring parameter
Feedback pulse accumulation
Command pulse accumulation
DC voltage of main circuit
Rotor relative to Z pulse position
Molecule of actual electric gear ratio
Denominator of actual electric gear
ratio
Feedback of encoder absolute position
Encoder EEPROM data state
Circles of multi-circle encoder
EtherCAT clock synchronous
correction state
State of CANopen state machine
Node of PROFIBUS-DP slave station
 Loading...
Loading...
