6 7
KEB COMBIVERT F4-C
10
Name: Basis
21.04.99
Keep on Running Functions
© KEB Antriebstechnik, 1999
All Rights reserved
Functional Description
Chapter Section Page Date
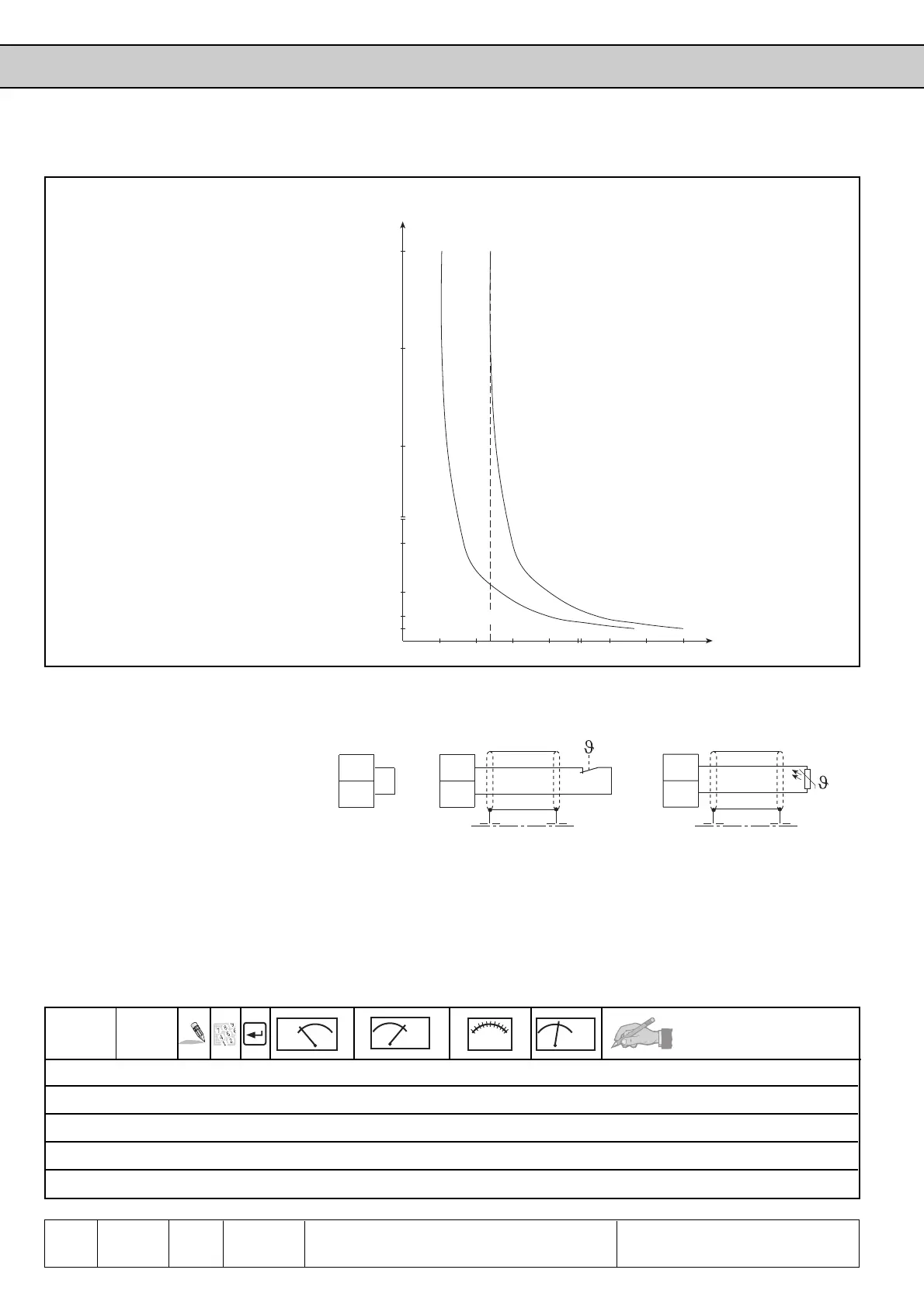
50 100 150 200 400 600 800
%
5 sec
30 sec
1 min
2 min
30 min
60 min
120 min
120
f = 0 Hz
OH
OH
OH
OH
OH
OH
Param. Adr.
min
max
default
ENTER
PROG.
R/W
Step
Tripping time
Motor current
f ≥ Rated motor frequency or
forced-ventilated motor
Picture 6.7.4.b Tripping times of motor protective function
The KEB COMBIVERT provides another possibilitiy to protect the motor by connecting
an external temperature monitoring. Following components can be connected to
terminals OH/OH:
External error control
procedure
Bridge when no
external evaluation
takes place
Thermo contact
(NC contact)
Temperature sensor (PTC)
1650Ω...4kΩ tripping resistance
750Ω...1650Ω reset resistance
If the thermo contact opens or the temperature sensor rises via the operating initial
resistance, the internal switching condition 6 is set. With do.1...do.4 a digital output
can be set (see Chap. 6.3). After expiration of an adjustable time (Pn.16) , the inverter
switches off with error E.dOH.
Used Parameters
Pn.3 2203h ✔✔-0 4 1 0-
Pn.15 220Fh ✔✔-0 7 1 0-
Pn.16 2210h ✔ - - 0 120s 1s 10s -
dr.2 2402h ✔✔- 0,0 460,0A 0,1A LTK depending on power circuit
ru.9 2009h - - - 0,0 460,0A 0,1A - -
For self-ventilated motors the
tripping times decrease with the
frequency of the motor (see
picture 6.7.4.b). The motor
protective function acts
integrating, i.e. times with
overload on the motor are added,
times with underload are
substracted. After triggering the
motor protective function, the
new tripping time is reduced to
1/4 of the specified value, if the
motor has not been operated for
an appropriate time with
underload.
E.dOH Switch-off delay (Pn.16)
 Loading...
Loading...









