7 SAFETY RESPONSE TIME AND SAFE STOPPING DISTANCE
7-88 Safety Response Time
7. SAFETY RESPONSE TIME AND SAFE STOPPING
DISTANCE
Below are the definitions of safety response times and maximum stopping distances for the robot.
7.1 Safety Response Time
Calculate the maximum safety response time (SFRT) from when the safety input device turns OFF until when the
robot stops (including error detections) with the following values according to the system being constructed: (a)
Input device response time, (b) Safety data transmission time (maximum value), and (c) Output device response
time.
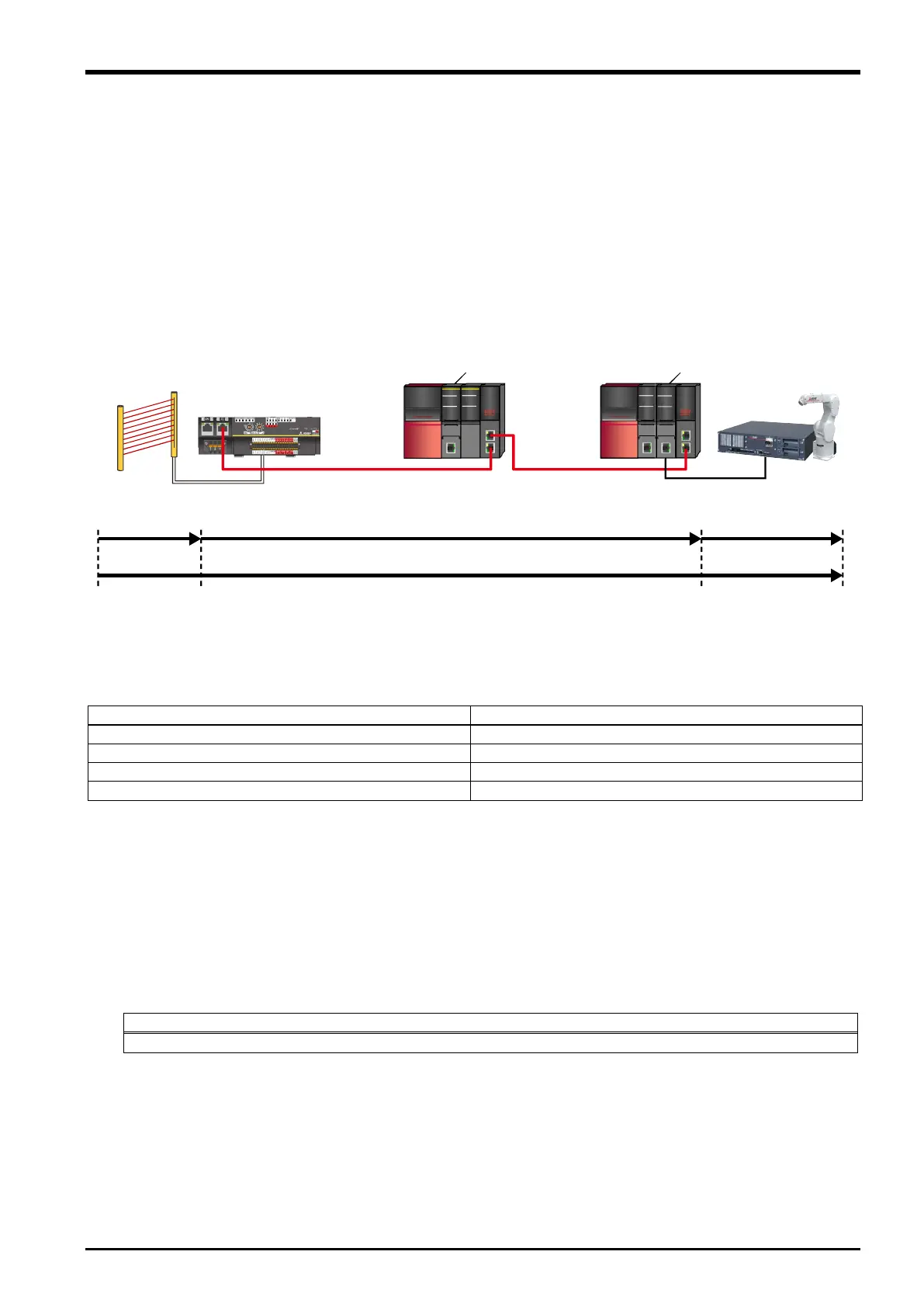
Fig. 7-1: Safety response time
The maximum value of safety response time (SFRT) will be the sum of (a) to (c) of the following.
(a) Input device response time
(b) Safety data transmission time (maximum value)
(c) Output device response time
(a) Input device response time: DTin
Check the specifications of the input device.
(b) Safety data transmission time (maximum value): DTtrs
Calculate the maximum time from when the safety input of the safety remote I/O module turns OFF until when
the robot controller receives data (including error detections) as follows.
・ When using one safety CPU module
Safety remote I/O module -> Safety CPU module -> Robot controller
Safety data transmission time (maximum value): DTtrs
DTtrs = (SCcpu × 3) + (SRref × 2) + (SCrc × 2.5) + RM1 + RM2 + SRin + (n1 × 2) + (n2 × 2)
SCcpu: Safety cycle time of the safety CPU module
SRref: Refresh response processing time of the safety remote I/O module
SCrc: Safety cycle time of the robot controller (7.11 [ms])
RM1: Safety refresh monitoring time (Safety CPU module - Safety remote I/O module)
RM2: Safety refresh monitoring time (Safety CPU module - Robot controller)
SRin: Input response time of the safety remote I/O module
n1: "n" shown below (Safety CPU module - Safety remote I/O module)
n2: "n" shown below (Safety CPU module - Robot controller)
n: The lowest value of either 1) or 2) shown below
(c) Output device
response time
(a) Input device
response time
(b) Safety data transmission time (maximum value)
Safety response time
Light
curtain
Safety CPU module
Robot CPU
module
Safety remote I/O
module (remote station)
Safety programmable
controller (master station)
Programmable controller
(local station)
CC-Link IE TSN CC-Link IE TSN
 Loading...
Loading...



