4 SAFETY MONITORING FUNCTIONS
4-72 Safety Diagnosis Function
4.6 Safety Diagnosis Function
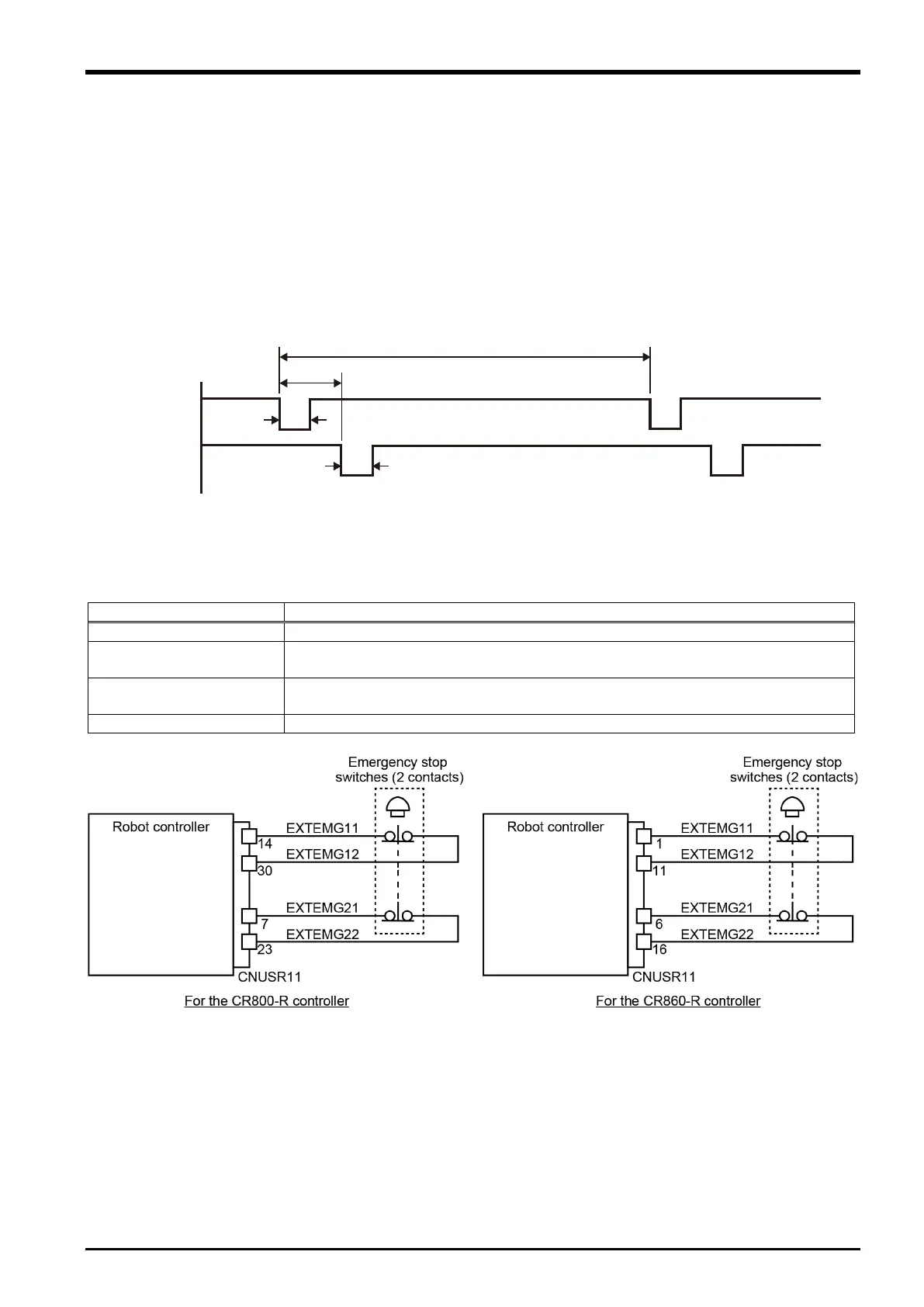
4.6.1 Test pulse diagnosis (EMG)
This function enables diagnosis of external wiring by pulse signals output from the emergency stop ports
(EXTEMG11, EXTEMG21). Changing parameter TPOEMG allows EXTEMG11 and EXTEMG21 to output off-
pulses regularly. The width of output pulses is always approximately 20 ms. Checking regularly the test pulses
inside the robot controller enables confirming the correct operation of the emergency stop lines. When an
emergency stop signal triggers the SS1 function, use of this safety diagnosis function satisfies SIL3 and
PLe/Category 4.
When using this function, connect emergency stop switches by seeing Fig. 4-66.
Make sure to prevent test pulses of this function from causing faulty operation of peripheral devices.
Fig. 4-65: Test pulse diagnosis
Table 4-13: Test pulse diagnosis
This enables configuring the pulse output function for outputting test pulse
signals from emergency stop ports (EXTEMG11, EXTEMG21).
What parameter settings
means
0: Outputs no test pulses
1: Outputs test pulses
Fig. 4-66: How to wire emergency stop lines
EXTEMG11
Approx. 1000ms
Approx.
20ms
Approx.
20ms
Approx.
40ms
EXTEMG21
 Loading...
Loading...



