4 SAFETY MONITORING FUNCTIONS
4-16 Overview of the Safety Monitoring Functions
4. SAFETY MONITORING FUNCTIONS
This chapter provides information on the safety monitoring functions of the robot controller and how to configure
the settings.
4.1 Overview of the Safety Monitoring Functions
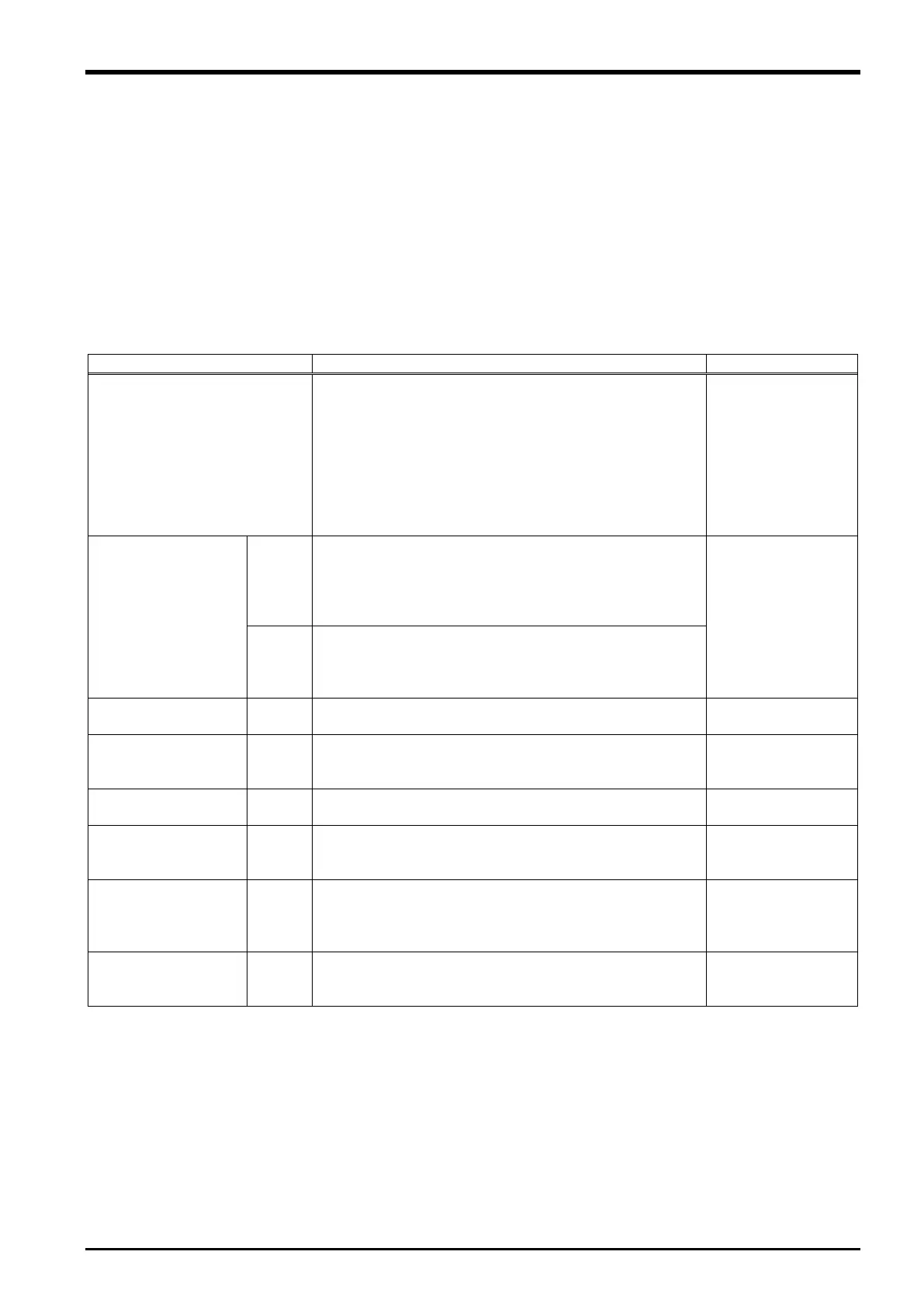
The following table lists safety monitoring functions that can be implemented with the safety communication
function.
Table 4-1 Safety Monitoring Functions Overview
function
This function performs safety communication with the
safety programmable controller using functional safety-
compatible protocols. Input signals are used to switch
the safety monitoring function, and output signals are
used to output the status of the safety monitoring
functions (safety logic edit).
When the safety communication function is enabled,
the following safety monitoring functions are available.
SS1 (STO), SS2 (SOS), SLS, SLP
Communication
Function
This allows defining conditions for the safety monitoring
function to work.
Safety input signals and the AREA information of the
robot can be combined to configure the conditions to
trigger the safety monitoring functions.
Edit
This allows outputting safety signals based on running
states of the safety monitoring functions and AREA
monitoring information. This is used for displaying
safety states or connecting other safety devices.
The function shuts off driving energy to the motors of
the robot.
4.5.1 Safe torque
off (STO)
Without shutting off the driving energy to the motors,
this function monitors the robot so that it stays at rest.
operating stop
This is a function to stop the robot safely. After stopping
the robot, power off the motors.
This is a function to stop the robot safely. While the
motor control keeps working after the robot stops, this
function monitors the robot so that it does not work.
(SS2)
function
This is a function to monitor the robot arm and the tools
so that their speeds do not exceed specified limits.
• Speed monitoring in XYZ coordinates
• Speed monitoring in joint coordinates
speed function
(SLS)
position function
This is a function to monitor whether positions of the
robot arm and the hand are in a safe area.
position function
■Restrictions
The following functions and option cannot be used in conjunction with the safety communication function.
• Robot safety option
• Controller CPU drive mode function
• Machine lock function
• CPU standalone mode function
 Loading...
Loading...



