5 ROBOT (SYSTEM) STATE VARIABLES
5-78 List of Robot (System) State Variables
5. ROBOT (SYSTEM) STATE VARIABLES
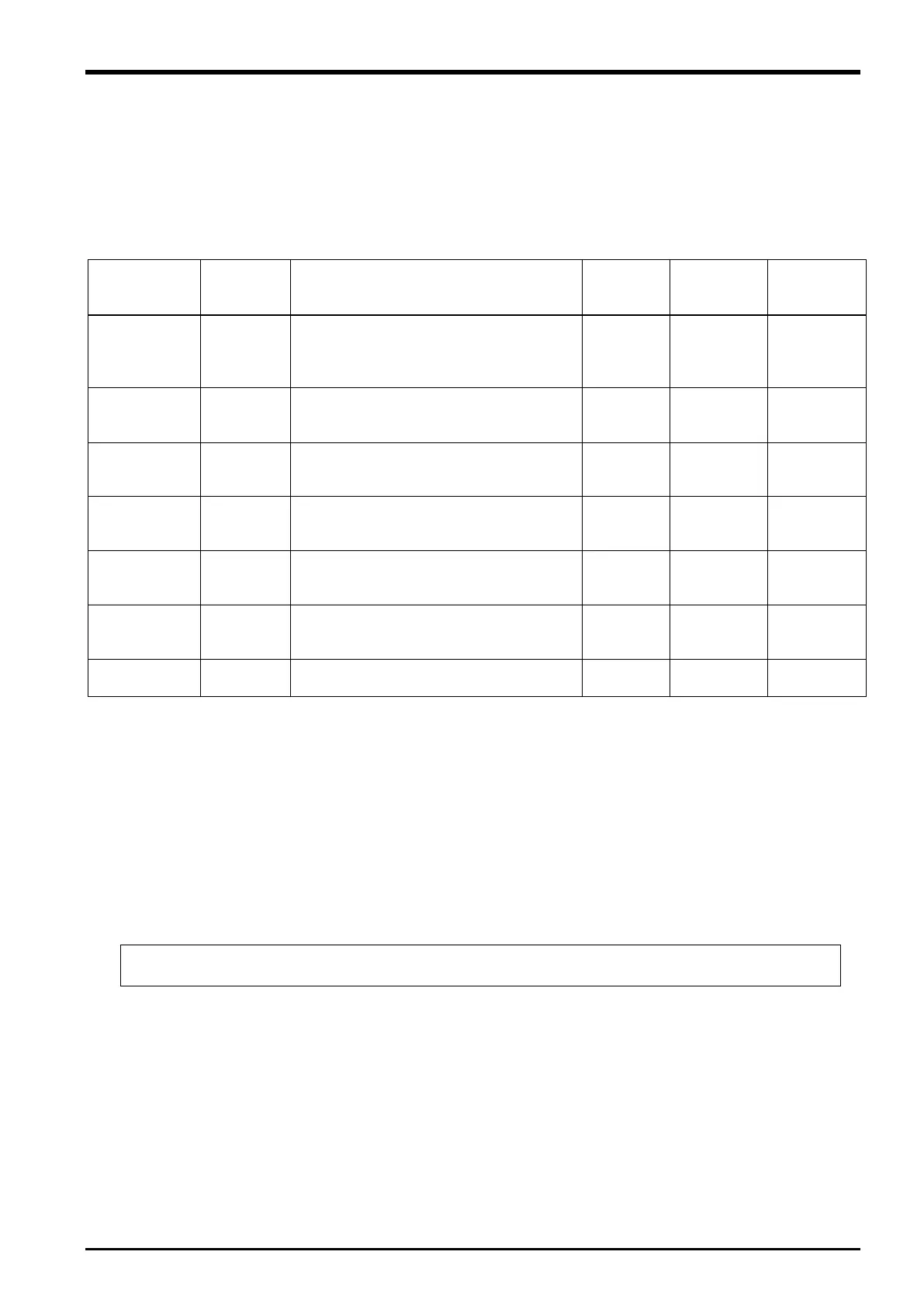
The table below shows state variables that are related to the safety communication function and safety monitoring
functions.
5.1 List of Robot (System) State Variables
Table 5-1 Safety connection status (state variables)
variable
array
and unit
(0: Disconnected, 1: Waiting for
connection establishment, 2:
type
number
Safety communication function's safety
input SCNIn
type
number
(1: Enable, 0: Disable)
type
number
Safety communication function's SCNI
and area input's logic input LOGICn
type
number
Safety communication function's safety
output SCNOn
type
number
Execution states of safety functions
(1: Enable, 0: Disable)
type
* Attribute R: Read-only
5.2 Explanations of Robot (System) State Variables
M_SCNSts
[Function]
Whether safety connection is established is returned.
Disconnected/function disabled: 0
Waiting for connection establishment: 1
Established: 2
[Format]
Example) <Numerical variable> = M_SCNSts
[Terminology]
<Numerical variable> This specifies a numerical variable to which a value is to be assigned.
[Reference Program]
M1 = M_SCNSts 'Whether safety connection is established is stored in M1.
[Explanation]
(1) Whether safety connection is established is returned.
(2) Read-only.
(3) When the function is disabled, "0" is returned.
 Loading...
Loading...



