3 CONNECTIONS AND COMMUNICATION DESTINATION SETTINGS
Creating a Safety Program 3-15
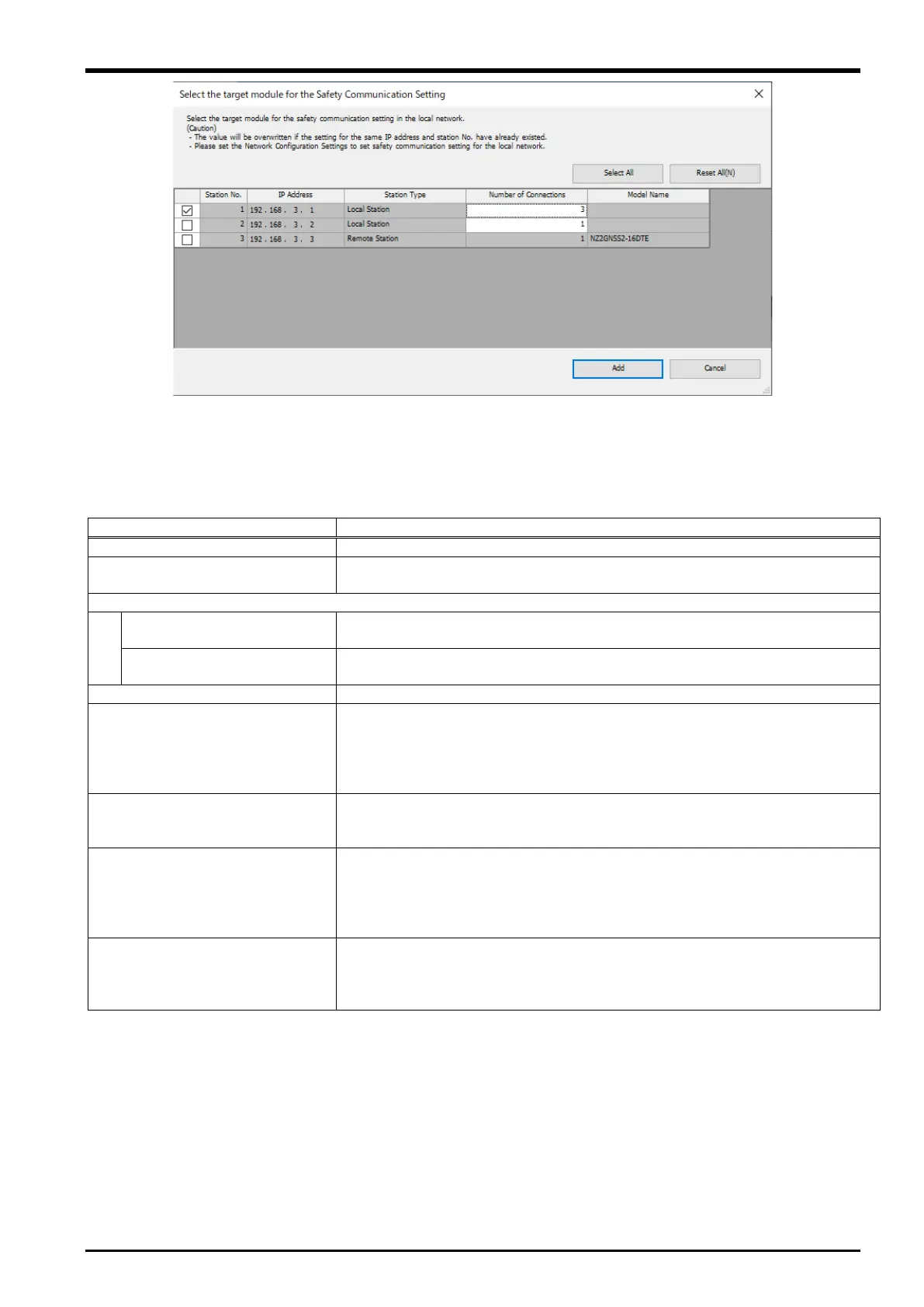
Fig. 3-3: Select the target module for the Safety Communication Setting
Table 3-4 Safety communication settings (master station)
Communication Destination
Select the target module for the
Safety Communication Setting
Select local stations (robot controllers) used for safety communication.
Communication Destination
(Note 1)
Set the numbers (multiple CPU system) of the robot CPU modules
(R16RTCPU) for the robot controllers that perform safety communication.
Active (safety connection established from the own station)
Sending Interval Monitoring Time
Set a value that satisfies the conditions shown in "4.7.2 Transmission
interval monitoring time" according to the system configuration. If the error
H8254 (Safety comm. timeout) is detected, review the setting value. When
the transmission interval monitoring time is changed, change the conditions
of the safety refresh monitoring time (master station-side settings) as well.
Safety Refresh Monitoring Time
Set a value that satisfies the conditions shown in "4.7.3 Safety refresh
monitoring time" according to the system configuration. If the error H8252
(Safety comm. timeout) is detected, review the setting value.
Receive Data Storage Device
Set a device that stores the data received from the robot controller
performing safety communication. When setting the number of device
points, set "16" for bit devices, and "1" for word devices. The SCNO outputs
of the robot controller are stored in the first four points of the specified
Set a device that stores the data sent to the robot controller performing
safety communication. When setting the number of device points, set "16"
for bit devices, and "1" for word devices. The first eight points of the
specified device are sent as the SCNI inputs of the robot controller.
Note 1: Even when setting the CR860-R, set "CR800-R" as the communication destination.
3.4 Creating a Safety Program
Create a safety program in the safety CPU module for safety control of the system. Refer to the following manuals.
□ MELSEC iQ-R CPU Module User's Manual (Startup) (SH-081263ENG)
□ MELSEC iQ-R CPU Module User's Manual (Application) (SH-081264ENG)
□ MELSEC iQ-R Safety Application Guide (SH-081538ENG)
 Loading...
Loading...



