3 CONNECTIONS AND COMMUNICATION DESTINATION SETTINGS
3-14 Network Communication Settings
3.2 Network Communication Settings
Set the parameters of the CC-Link IE TSN master/local stations. The control CPUs of the master/local modules
are the safety CPU module on the safety programmable controller side and the programmable controller CPU
module (CPU No.1) on the robot side respectively. Connect GX Works3 to the control CPUs, and configure the
settings of the master and local stations.
Table 3-3 CC-Link IE TSN communication settings
programmable
RJ71GN11-T2
RnSFCPU
RJ71GN11-T2
Programmable controller CPU
module (CPU No.1)
For details on the settings, refer to the following manuals.
□ MELSEC iQ-R CC-Link IE TSN User's Manual (Startup) (SH-082127ENG)
□ MELSEC iQ-R CC-Link IE TSN User's Manual (Application) (SH-082129ENG)
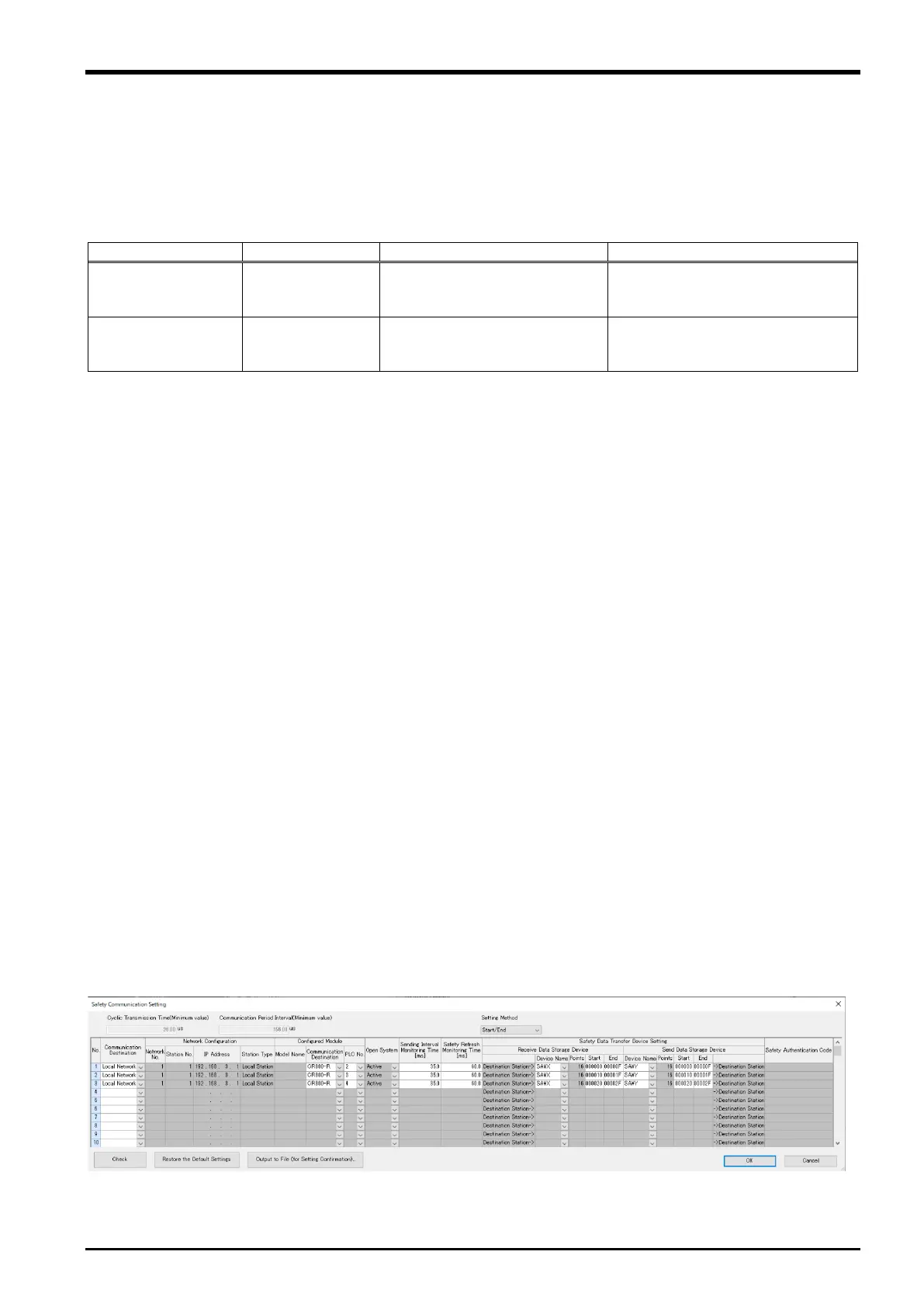
3.3 Safety Communication Settings (Safety Programmable
Controller Side)
Set safety communication parameters (safety programmable controller side) in GX Works3. Select [Parameter] -
> [Module Information] -> [RJ71GN11-T2] -> [Basic Settings], then configure the settings as shown below.
1. Set "To Use or Not to Use the Safety Communication Setting" to "Use".
2. Select "Detailed Setting" for "Safety Communication Setting" to open the Safety Communication Setting
window.
3. Select "Local Network " for "Communication Destination" to open the Select the target module for the
Safety Communication Setting window.
4. Select the local stations of the robot controllers used for safety communication individually, and set the
number of connections
*1
to add them.
5. Set Configured Module and Safety Data Transfer Device Setting for robot controllers used for safety
communication individually.
For details, refer to the following manuals.
□ MELSEC iQ-R CC-Link IE TSN User's Manual (Startup) (SH-082127ENG)
□ MELSEC iQ-R CC-Link IE TSN User's Manual (Application) (SH-082129ENG)
*1: In the "Number of Connections" field, set the number of robot controllers used for safety communication in the
selected local station. For example, to perform safety communication with three robot controllers in the multiple
CPU system, set "3" in the "Number of Connections" field.
Fig. 3-2: Safety Communication Setting
 Loading...
Loading...



