4 SAFETY MONITORING FUNCTIONS
Safety Monitoring Functions 4-55
4.5.5 Safely-limited speed function (SLS)
(1) Overview
This is a function to monitor the robot and the robot tool speeds so that they are under specified speed limits.
When they are above a speed limit, the SS1 function stops the robot.
Configuration of up to four different types (SLS1, SLS2, SLS3, SLSM) of speed monitoring conditions are
supported. During SLS monitoring, the devices move at speeds specified in Speed Limit OVRD.
(2) Operation sequence
(a) SLS_ function basic operation
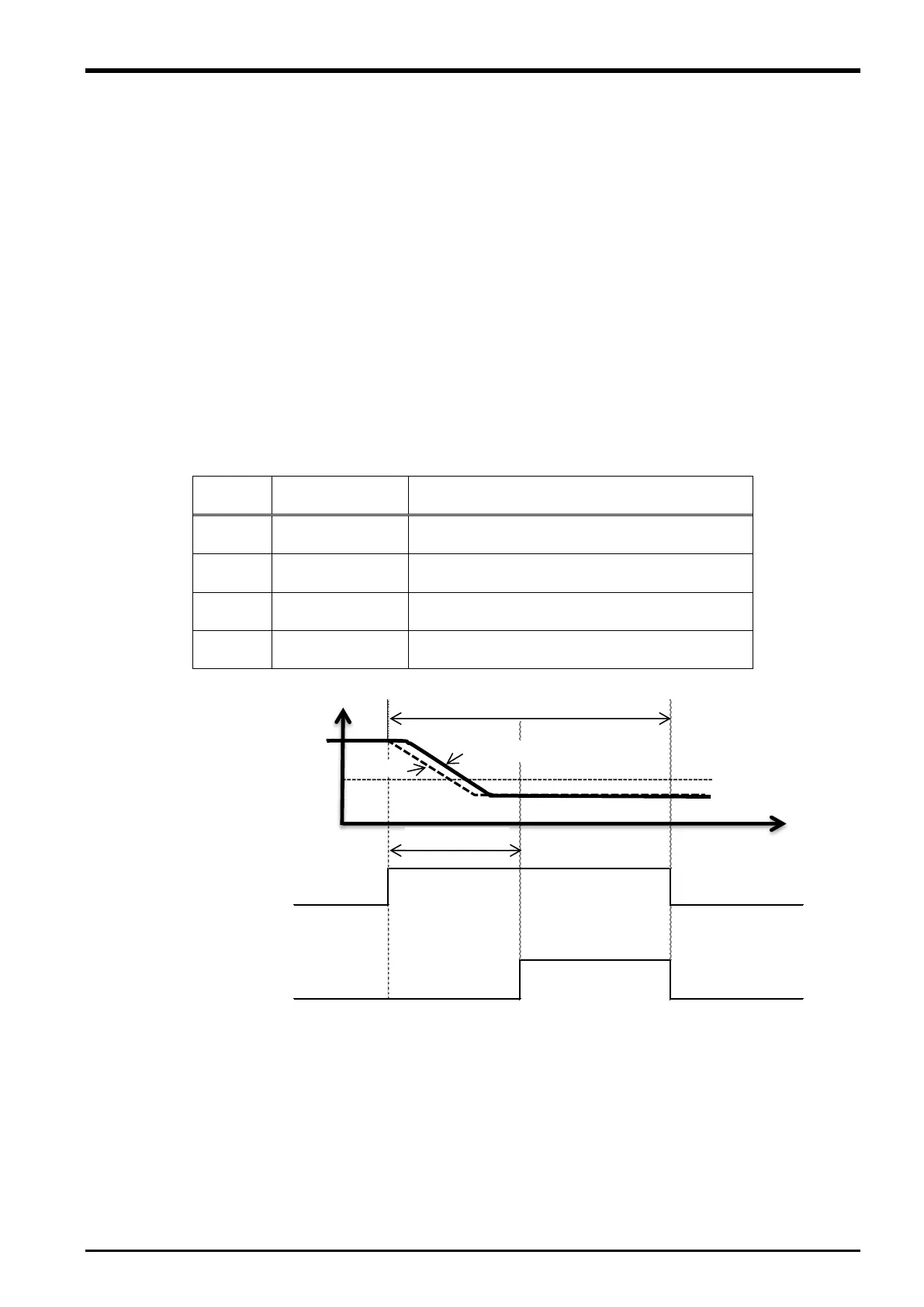
Enabling the SLS_ command starts the SLS function. The moment the SLS_ command is enabled,
deceleration starts at rates specified in Speed Limit OVRD and, after the deceleration monitoring time elapses,
the speed monitoring (SLS monitoring) starts.
Table 4-9: SLS function start conditions
When the signal assigned to the SLS1
command is input
When the signal assigned to the SLS2
command is input
When the signal assigned to the SLS3
command is input
When the signal assigned to the SLSM
command is input
Fig. 4-42: SLS_ function basic operation
Speed command
Speed feedback
Deceleration
monitoring time
 Loading...
Loading...



