4 SAFETY MONITORING FUNCTIONS
4-52 Safety Monitoring Functions
4.5.4 Safe stop 2 (SS2)
(1) Overview
The SS2 command input starts deceleration and, after the motors of all the axes are decreased to a speed
at or below the safe stop speed, SOS is started. (This function corresponds to stop category 2 of IEC
60204-1.)
Failure in deceleration within a specified maximum delay causes error H2281 (SS2 deceleration timeout).
(2) Operation sequence
(a) SS2 command (Normal operation)
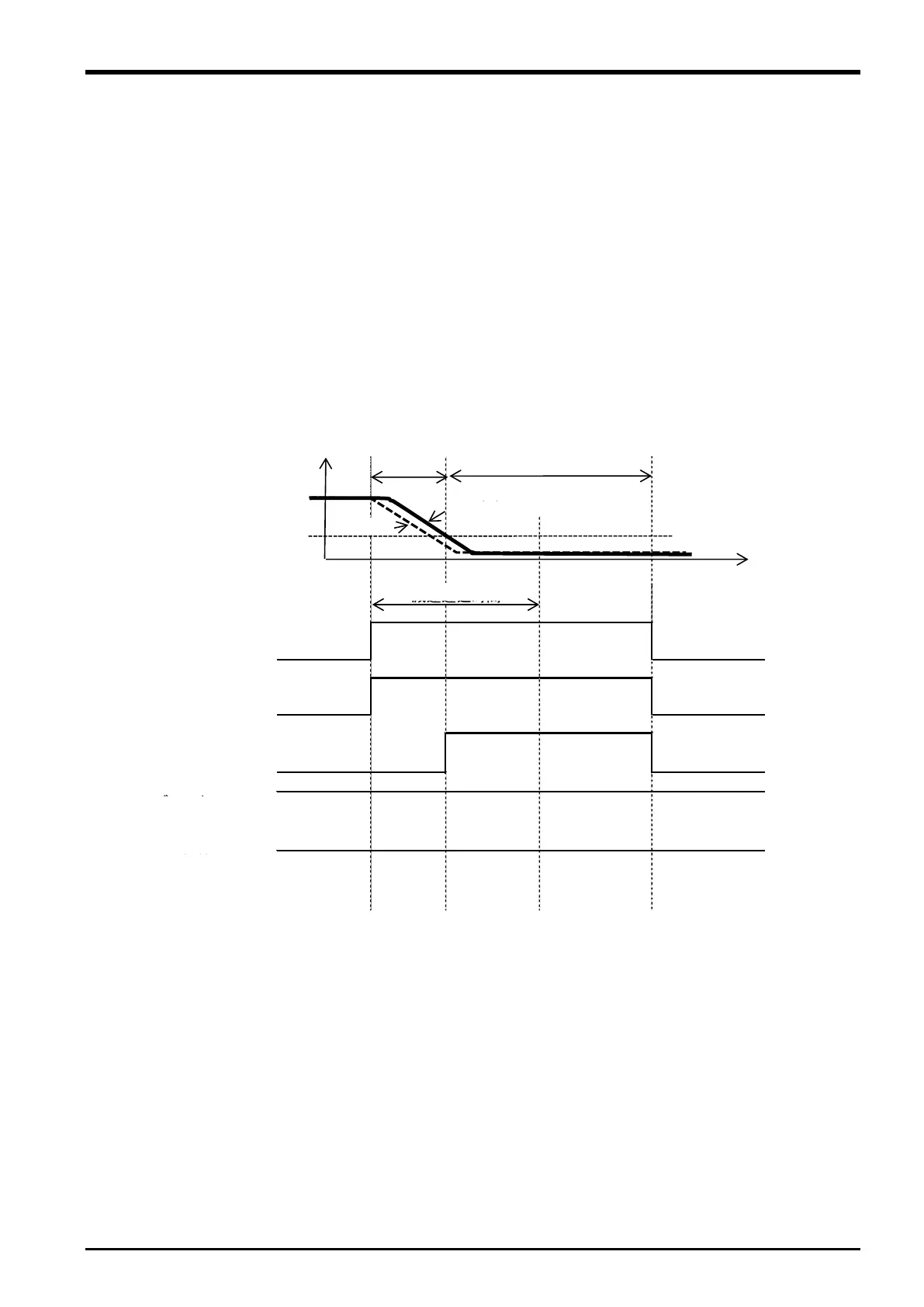
The operation sequence of the SS2 function is as follows. Enabling the SS2 command while the robot is in
operation starts the SS2 function. The triggered SS2 starts deceleration at a specified deceleration rate.
After the speed command reaches the safety speed, SOS starts position monitoring with servo-on state
kept. Disabling the SS2 command restores the normal operation state.
速度 SS2 SOS
フィードバック
指令
時間
0r/min
有効
無効
有効
無効
有効
無効
ブレーキ 解除
ロック
モータ電源供給 ON
OFF
Fig. 4-38: SS2 command (Normal operation)
 Loading...
Loading...



