Calibrate the robot system Startup
5 - 6
5.1.3 Set the home position (zero point)
The home position is set after delivery of the robot by means of data entry. The data from the man-
ufacturer for the stipulated home position is on the product insert in the robot arm box.
The data is also contained on a sticker on the robot:
●
for RV-2SD and RV-2SQ on the inside of battery compartment cover
●
for RV-3SD/3SDJ and RV-3SQ/3SQJ on the inside of arm cover A
●
for RV-6SD/6SDL, RV-6SQ/6SQL, RV-12SD/12SDL and RV-12SQ/12SQL on the inside of arm cover B
●
for RH-6SDH/12SDH/20SDH and RH-6SQH/12SQH/20SQH on the inside of the J1 cover
●
for RH-3SDHR and RH-3SQHR on the inside of the base cover B(L)
A detailed description on how to remove a cover is contained in the technical manual of the respec-
tive robot.
E
ATTENTION:
The data used for the home setting of the zero point is in the "Default" column of the product
insert. If the new setting of the home position of the robot arm has been carried out (e.g. when
replacing a motor) using another method (e.g. after calibration device), then the last data to
have been entered are valid.
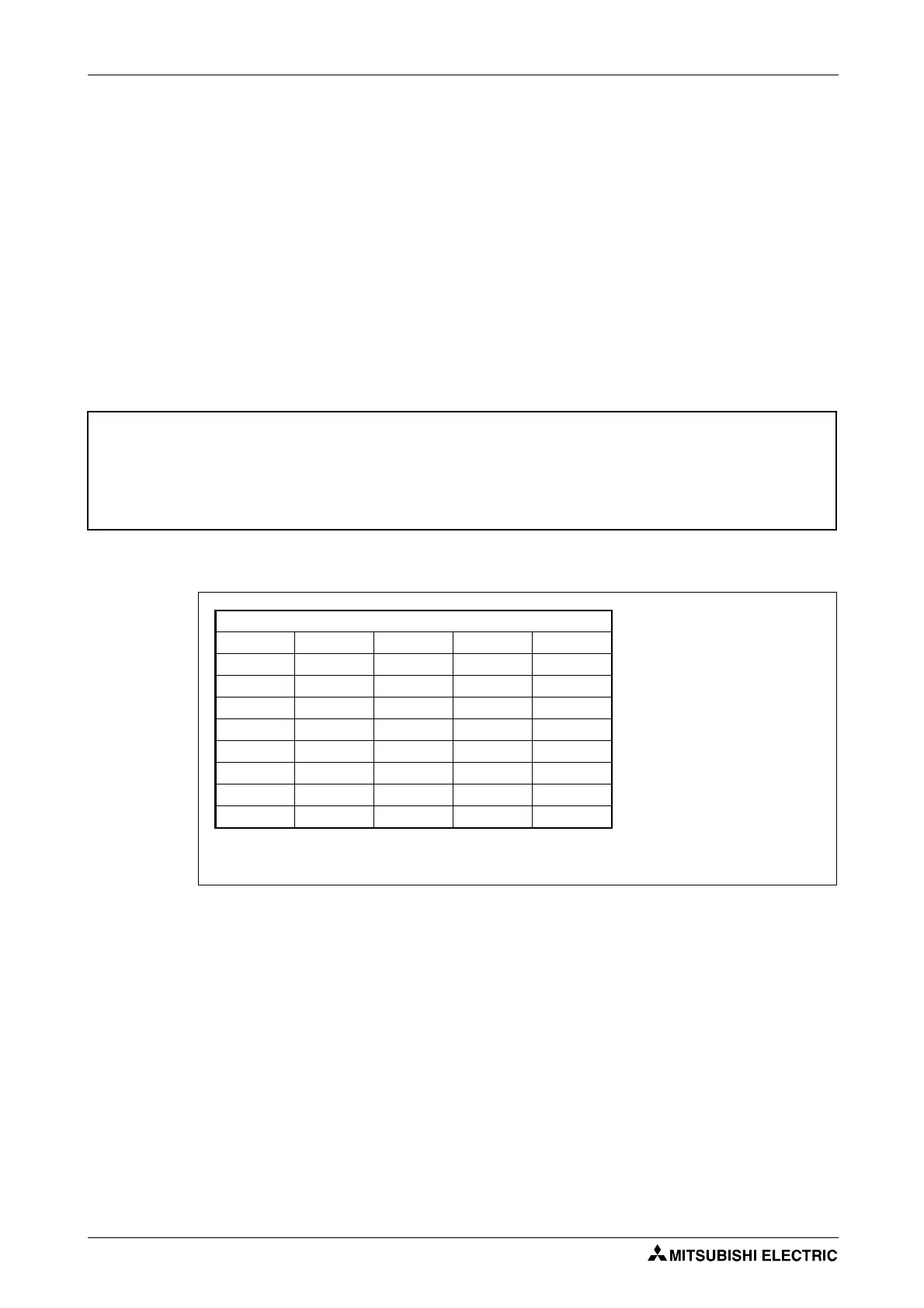
Fig. 5-4:
Product insert with the home position data (example data)
쎲 Origin data history table Serial No. ES804008
Date Default . . . . . . . . .
DV!#S29
J1 06DTYY
J2 2?HL9X
J3 1CP55V
J4 T6!M$Y
J5 Z2IJ%Z0
J6 A12%Z0
Method E E · N · SP E · N · SP E · N · SP
Adjustment method
E: with calibration device
N: no function
SP: no function
 Loading...
Loading...


