7 - 31
7 Applied Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
7-8 Torque Limit Switching
7
7-8-1 Operating Conditions
7-8 Torque Limit Switching
This function switches the torque limit according to the operation direction, and depending on the Posi-
tive Torque Limit (PCL), the Negative Torque Limit (NCL), and the Positive/Negative Torque Limit Input
Commands from EtherCAT communications.
This function is used in the following conditions.
• When push-motion operation, such as pressing, is performed.
• When the torque at startup and during deceleration is suppressed to protect mechanical systems,
etc.
The Torque Limit - Switching Selection (3330-01 hex) is used to select a method to switch the torque
limit.
The torque limit switching function is enabled under the following conditions.
• Position control, velocity control, and torque control
• The Servo is ON.
7-8-1 Operating Conditions
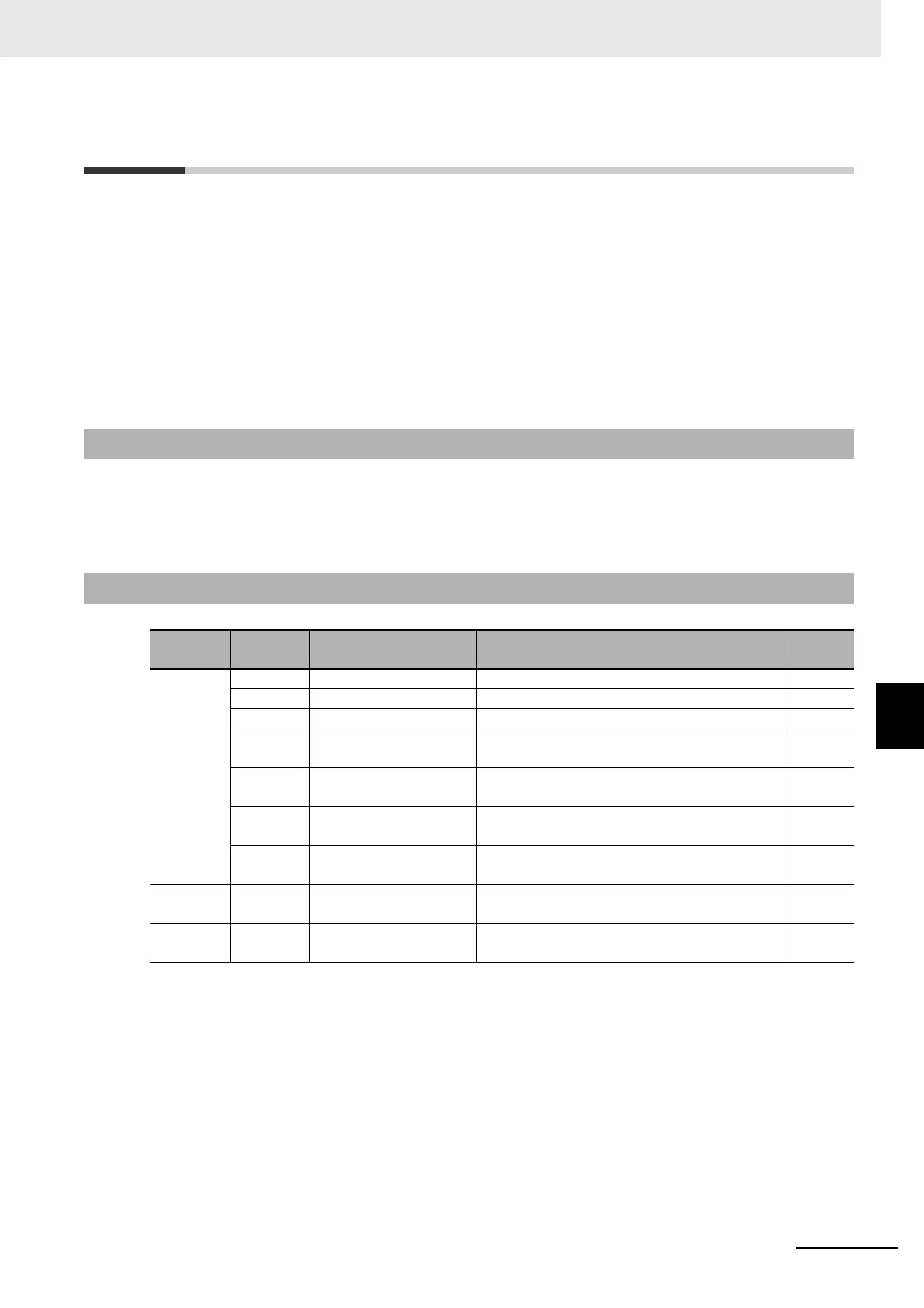
7-8-2 Objects Requiring Settings
Index
(hex)
Subindex
(hex)
Name Description
Refer-
ence
3330
---
Torque Limit Sets the torque limit function. P. 9-54
01 Switching Selection Selects the torque limit switching method. P. 9-54
02 Max Torque Sets the maximum torque limit value. P. 9-54
03 Positive Torque Limit
Value
Sets the positive torque limit value. P. 9-55
04 Negative Torque Limit
Value
Sets the negative torque limit value. P. 9-55
05 Positive Torque Limit
Value 2
Sets the positive torque limit value 2. P. 9-55
06 Negative Torque Limit
Value 2
Sets the negative torque limit value 2. P. 9-55
60E0 --- Positive torque limit
value
Sets the positive torque limit value. P. A-58
60E1 --- Negative torque limit
value
Sets the negative torque limit value. P. A-58

 Loading...
Loading...
