9 - 75
9 Details on Servo Parameters
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
9-7 Applied Function Objects
9
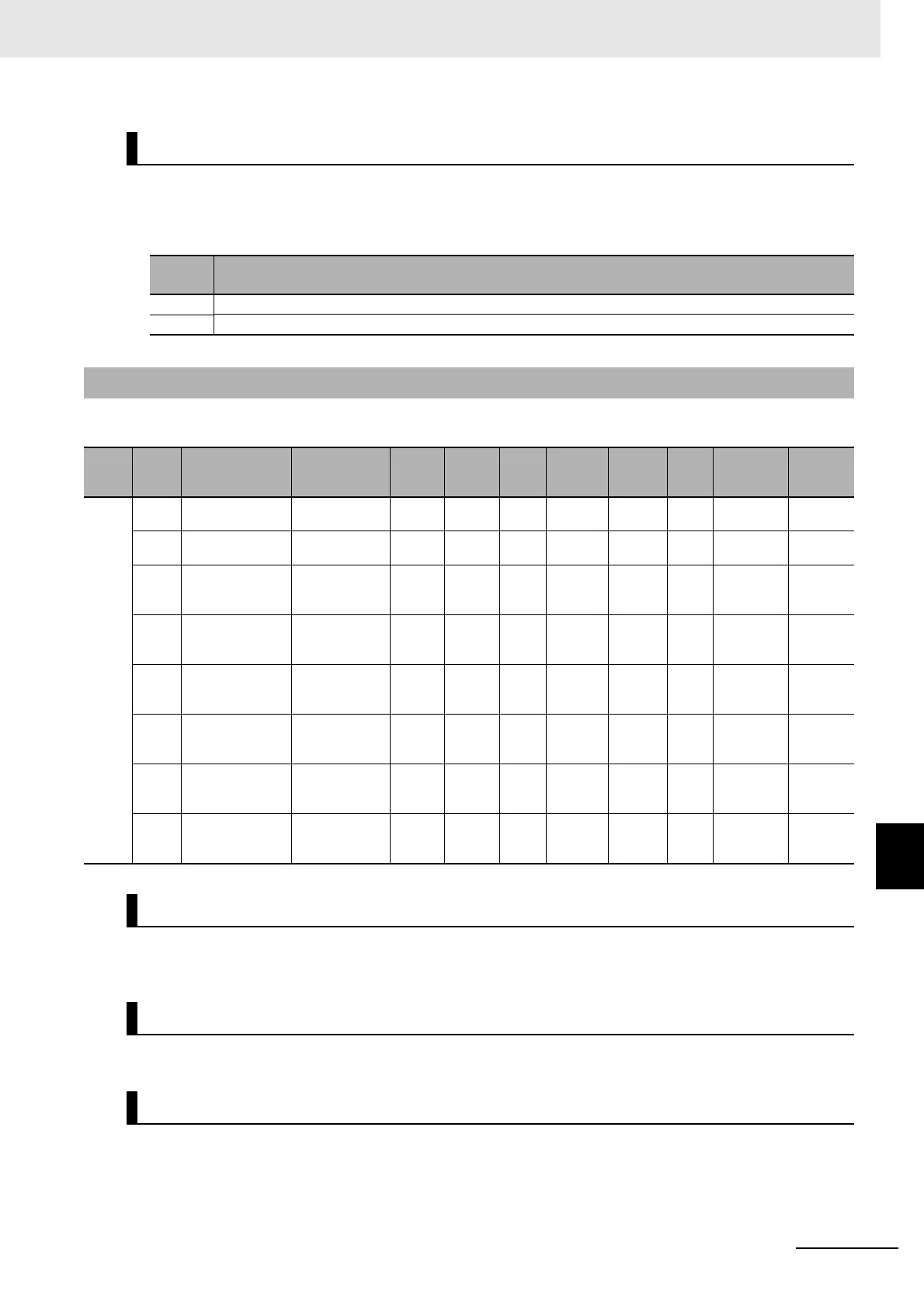
9-7-12 3B60 hex: Speed Detection Function
• Gives the status of Positioning Completion 2.
Description of Set Values
Sets the Speed Detection Function.
• Sets the velocity to be detected by the velocity attainment detection function which detects that the
motor velocity reaches any velocity.
• Sets the rotation speed [r/min] at which the motor speed can be regarded as 0 (stop).
• Sets the range (deviation) in which the motor velocity can be regarded as conformed to the command
velocity.
Subindex 81 hex: Status
Set
value
Description
0 Not completed
1 Completed
9-7-12 3B60 hex: Speed Detection Function
Index
(hex)
Sub-
index
(hex)
Object name Setting range Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes
of opera-
tion
3B60 --- Speed Detection
Function
--- --- --- --- --- --- --- Possible ---
00 Number of entries --- --- 81 hex --- 1 byte
(U8)
RO --- --- ---
01 Velocity Attain-
ment Detection
Level
10 to 20,000 r/min 1,000 A 4 bytes
(INT32)
RW --- --- csp, csv,
cst, pp,
pv, hm
02 Zero Speed
Detection Level
10 to 20,000 r/min 50 A 4 bytes
(INT32)
RW --- --- csp, csv,
cst, pp,
pv, hm
03 Velocity Confor-
mity Detection
Range
10 to 20,000 r/min 50 A 4 bytes
(INT32)
RW --- --- csp, csv,
cst, pp,
pv, hm
04 Excessive Speed
Detection Level
-2,147,483,648
to
2,147,483,647
r/min 0 A 4 bytes
(INT32)
RW --- --- csp, csv,
cst, pp,
pv, hm
05 Excessive Veloc-
ity Deviation
Detection Level
0 to 20,000 r/min 0 A 4 bytes
(INT32)
RW --- --- csp, pp,
hm
81 Status --- --- --- --- 4 bytes
(INT32)
RO --- --- csp, csv,
cst, pp,
pv, hm
Subindex 01 hex: Velocity Attainment Detection Level
Subindex 02 hex: Zero Speed Detection Level
Subindex 03 hex: Velocity Conformity Detection Range

 Loading...
Loading...
