9 - 77
9 Details on Servo Parameters
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
9-7 Applied Function Objects
9
9-7-14 3B71 hex: Runaway Detection
Sets the runaway detection function.
This object is available for the unit version 1.1 or later.
• Selects whether to enable or disable the runaway detection function.
Description of Set Values
• The default value is 1 (enabled).
• When the runaway detection function detects that the Servomotor rotates in the opposite direction
due to incorrect wiring of the motor cable, etc., a Runaway Detected (Error No. 20.00) occurs.
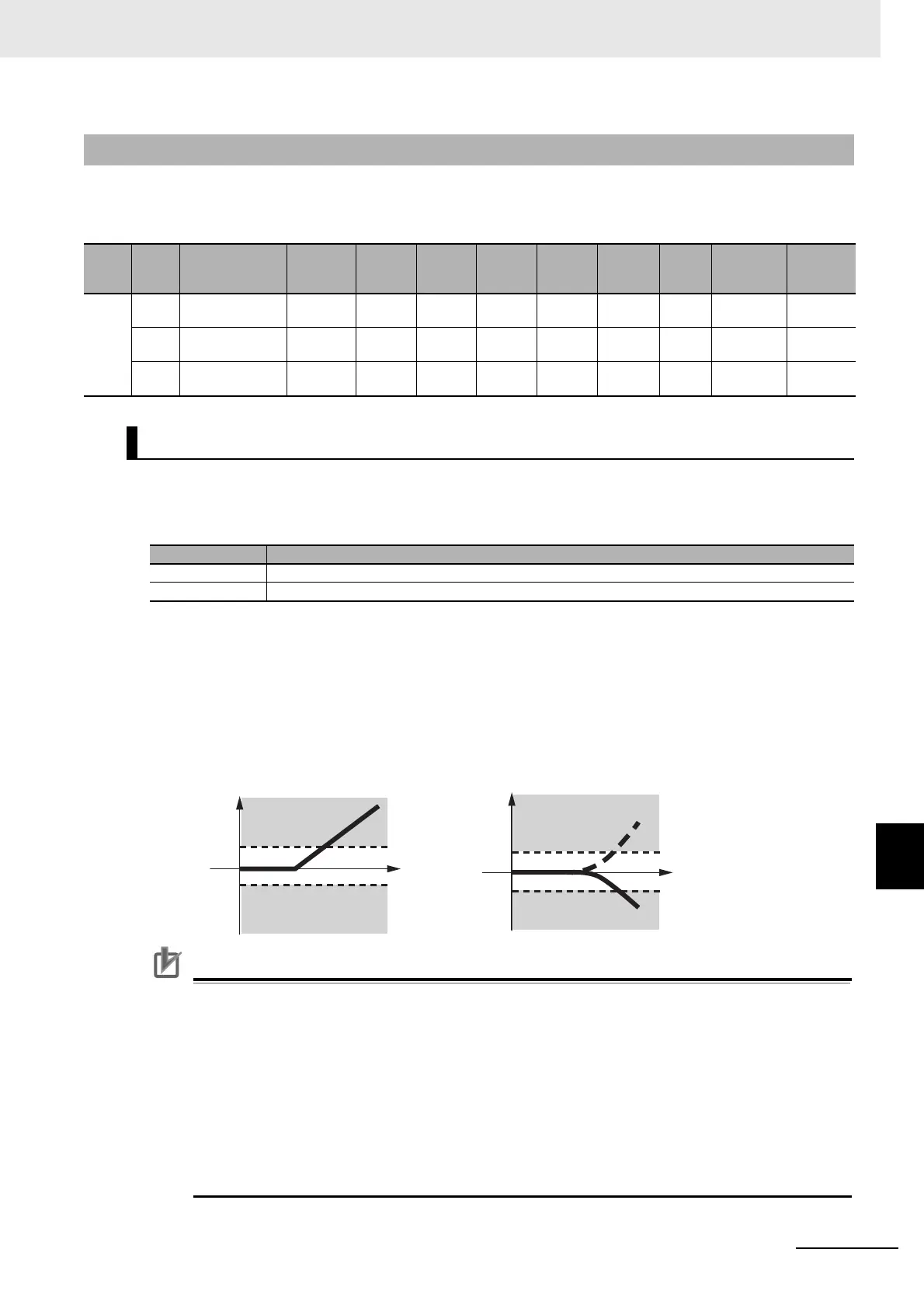
• When the command torque and the motor speed exceed a certain value after Servo ON, this func-
tion detects whether it is normal operation or an error. When the acceleration direction of the Ser-
vomotor does not conform to the direction of the command torque for a certain period of time, this
function determines that the Servomotor rotates in the opposite direction, a Runaway Detected
occurs.
Precautions for Correct Use
• If the gain is lower than the default setting, the runaway detection function may not work.
• If 1st Torque Command Filter -
Cutoff Frequency (3233-02 hex) or 2nd Torque Command
Filter - Cutoff Frequency (3234-02 hex) is set to 10 [Hz] or lower, this function may not
work.
• When the Servomotor has a near-no load such that the inertia ratio is 50% or lower, if 1st
Velocity Control Gain - Proportional Gain (3323-01 hex) or
2nd Velocity Control Gain -
Proportional Gain (3324-01 hex) is set to a value higher than 400 [Hz], this function may not
work.
• If the Servomotor rotates in the opposite direction by an external force over the momentary
maximum torque of the Servomotor.
9-7-14 3B71 hex: Runaway Detection
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes of
opera-
tion
3B71 --- Runaway Detec-
tion
--- --- --- --- --- --- --- Possible ---
00 Number of
entries
--- --- 01 hex --- 1 byte
(U8)
RO --- --- ---
01 Enable 0 to 1 --- 1 R 4 bytes
(INT32)
RW --- --- ---
Subindex 01 hex: Enable
Set value Description
0 Disabled
1 Enabled
Command torque
Detection range
Detection range
Detection range Nomal operation
ErrorDetection range
Motor speed

 Loading...
Loading...
