11 Adjustment Functions
11 - 30
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
In the TDF control, the smooth internal commands are generated in the TDF control section so that
rapid changes in target position or velocity do not cause overshooting. However, the smoother the
internal commands are, the longer the delay of the internal commands gets. This trade-off between the
overshooting suppression and internal command delay is adjusted with the command following gain.
The smaller the set value of Command Following Gain is, the more the overshooting can be
suppressed.
Normally, set Command Following Gain to 50%. Set a value of approximately 30% when you want to
suppress overshooting.
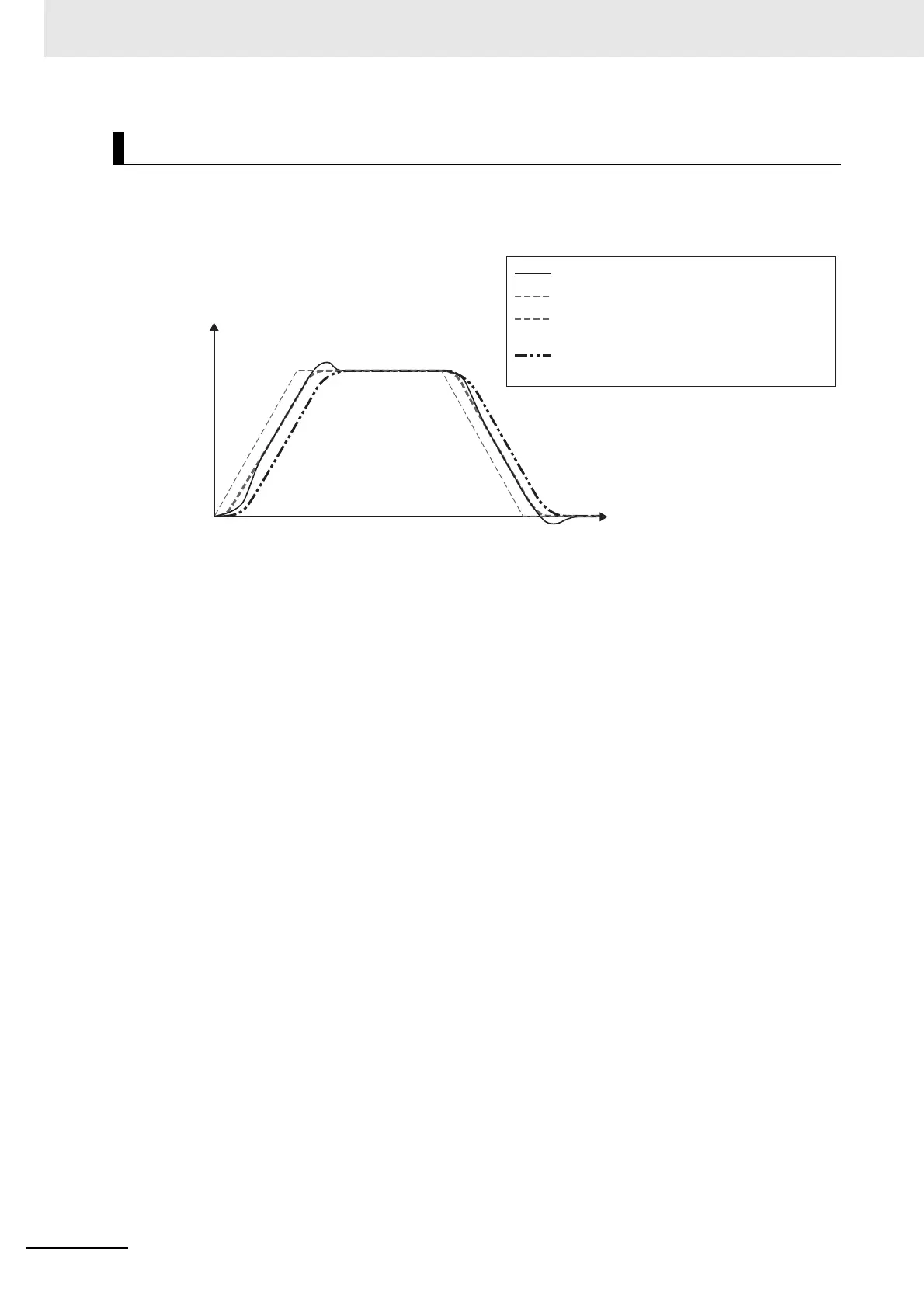
Adjustment of TDF Command Following Gain
Velocity
Time
Present Motor Velocity
Position Command – Motor Velocity
Internal Position Command – Motor Velocity
(Command Following Gain = 500%)
Internal Position Command – Motor Velocity
(Command Following Gain = 50%)

 Loading...
Loading...
