Rockwell Automation Publication 750-AT006D-EN-P - January 2022 15
Chapter 1 Background
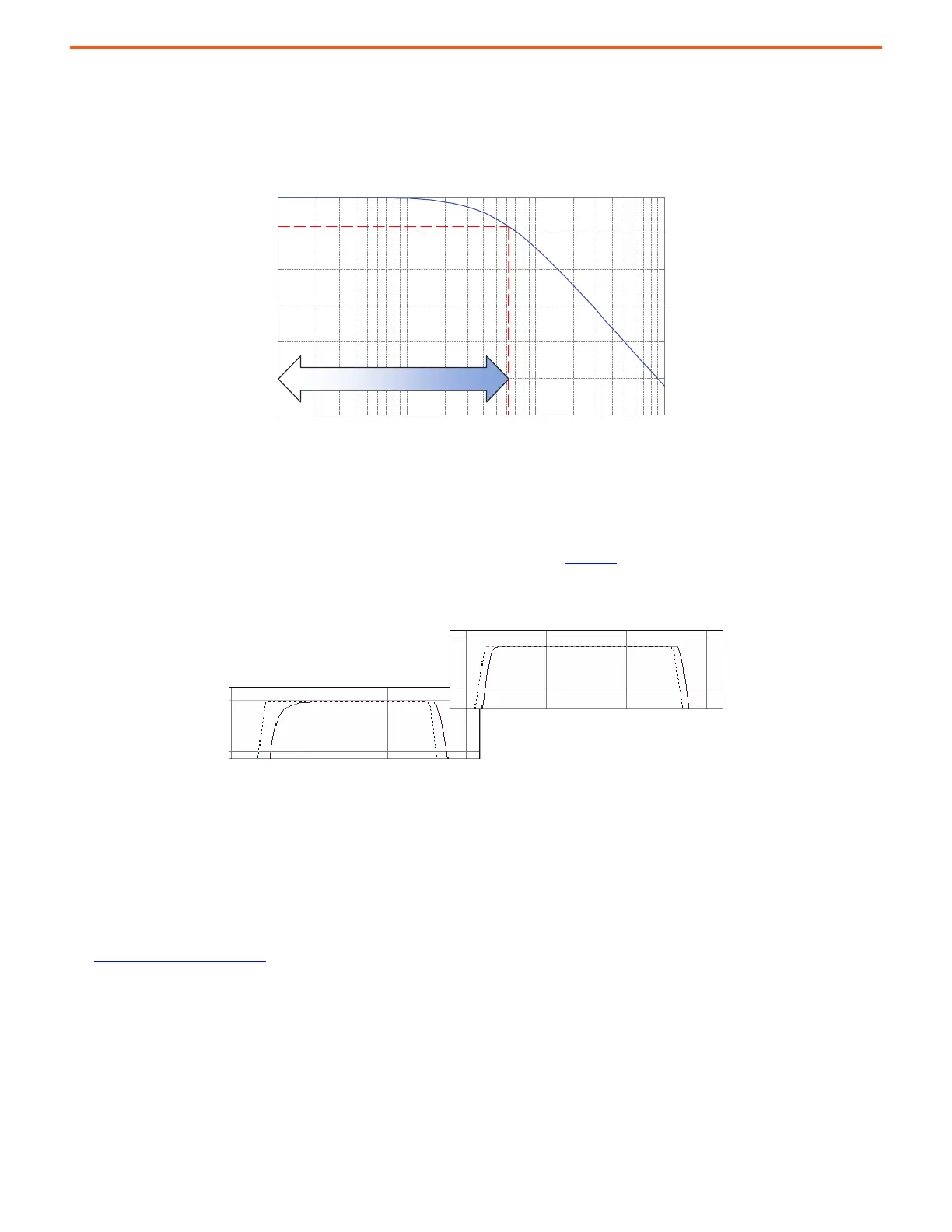
Bandwidth
Bandwidth (BW) is a widely used term that indicates performance. It is defined as the usable range of frequencies where the gain through a
system is above -3 dB.
Figure 11 - System Gain Versus Frequency
Bandwidth directly equates to transient response and how fast a system physically responds under a load to an input. There must be a way
to quantify and compare drive performance across various drive instances and the metric that makes the most sense is bandwidth, which is
measured in units of [Hz].
Position, velocity, and torque loop bandwidth indicate the respective performance of each regulator in the drive. Higher bandwidth improves
transient response, decreases error, and makes the motor shaft performance stiffer. Figure 12
shows how bandwidth affects actual
response (solid) compared to its reference move profile (dashed). Here, feed forward gains are disabled.
Figure 12 - How Bandwidth Affects Transient Response
The drive, motor, and feedback device have a significant impact on the bandwidth that can be achieved on a system through tuning. Closed
loop bandwidth is affected by these factors:
• Load Ratio (lower is better)
• Compliance and backlash (rigid coupling is better)
• Feedback resolution (higher is better)
• Drive loop update rate (higher is better)
• Drive Model Time Constant (smaller is better)
See System Bandwidth
on page 16 for more information on drive model time constant.
10
0
10
1
10
2
10
3
-30
-25
-20
-15
-10
-5
0
Frequency (Hz)
Gain (dB)
Bandwidth
Higher Bandwidth
Lower Bandwidth
 Loading...
Loading...


