Rockwell Automation Publication 750-AT006D-EN-P - January 2022 19
Chapter 1 Background
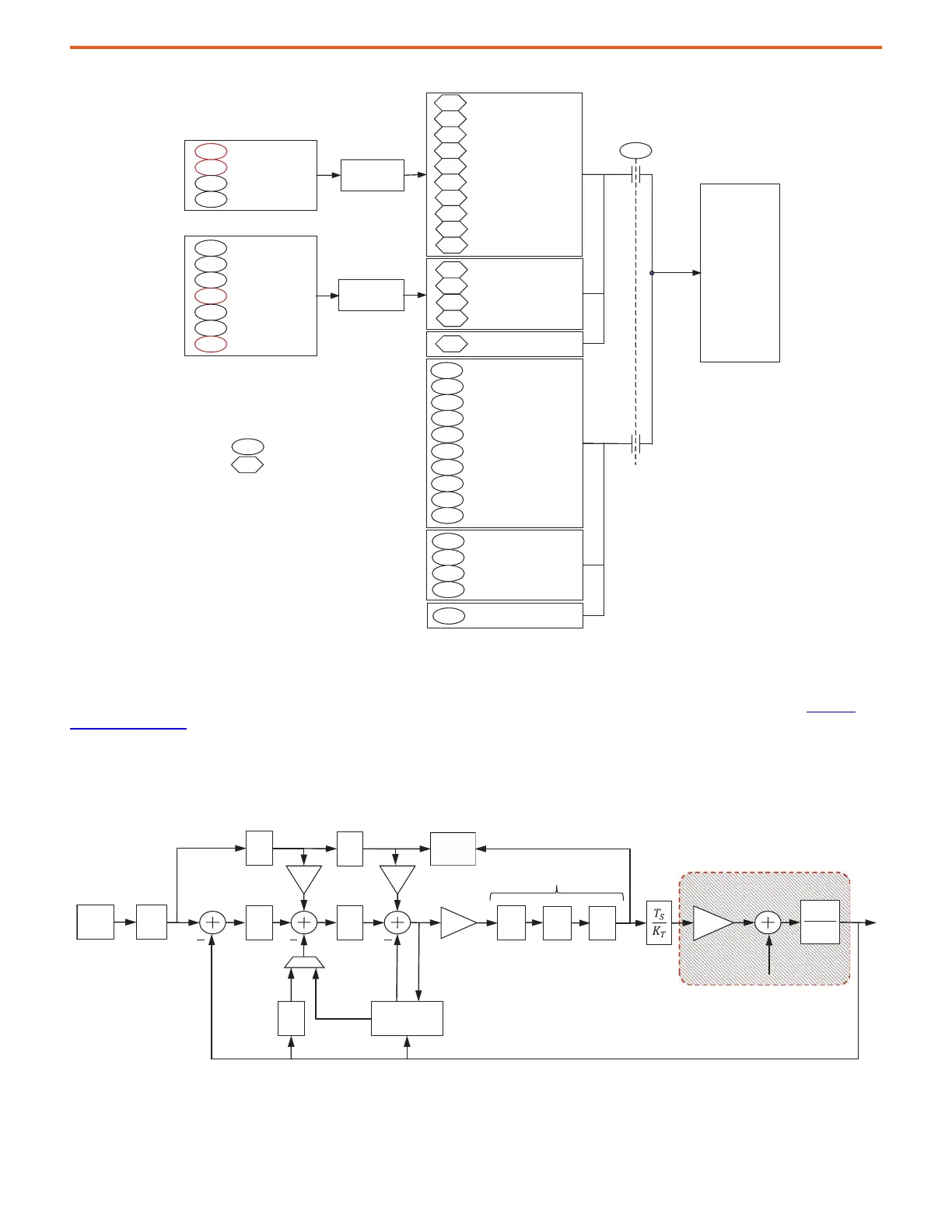
Figure 16 - Control Loop Gain Selection
Control Structure Overview
This section provides an overview of the control structure and the location of various product features relative to one another. Product
Features on page 27 goes into detail about each feature.
Flux Vector mode is selected by 0:65 [Pri MtrCtrl Mode] = Induction FV (3). It implements a position loop, that is wrapped around a velocity
loop, that is wrapped around a torque loop.
Figure 17 - Flux Vector Control Structure
System C/U Select
Calculated
User
Entered
1756
1955
1957
2021
2023
1754
1757
1956
1958
2022
2024
1755
905
Automatic
Calculations
c PReg Ki
c VReg Kp
c VReg Ki
c PReg Kp
c LdObs Kp
c LdObs Ki
u PReg Ki
u VReg Kp
u VReg Ki
u PReg Kp
u LdObs Kp
u LdObs Ki
Alt Encoder EPR
xxx
Encoder EPR
xxx
Motor Poles
407
System BW
906
1000
1006
1010
Pri Vel Fb Sel
Alt Vel Fb Sel
Alt Fb GnScale
System BW
901
Load Ratio
906
System Damping
907
LdObs Mode
2020
2154
1973
c Trq LPF BW
c Accel FF Gain
1002
1004
1928
c Vel Fb LPF BW
c Vel Fb LPF Gn
c Vel Comp Gain
Automatic
Calculations
2155
1974
u Trq LPF BW
u Accel F F Gain
1003
1005
u Vel Fb LPF BW
u Vel Fb LPF Gn
1929
u Vel Comp Gain
To Control
Loops
000
= Read Only
000
= User Entered
Kpi
Kvp
Kvi
Kpp
Kop
Koi
Kaff
Trq LPF BW
VelFb LPF BW
AltVelFbLPF BW
Vel Comp Gain
1009
1022
u AltVelFbLPF BW
u AltVelFbLPF Gn
1008
1021
c AltVelFbLPF BW
c AltVelFbLPF Gn
1959
1760
c Alt Kvi OL Fb
c Vel FF Gain
1960
1761
u Alt Kvi OL Fb
u Vel FF Gain
System C/U Select
Calculated
User
Entered
1756
1955
1957
2021
2023
1754
1757
1956
1958
2022
2024
1755
905
Automatic
Calculations
c PReg Ki
c VReg Kp
c VReg Ki
c PReg Kp
c LdObs Kp
c LdObs Ki
u PReg Ki
u VReg Kp
u VReg Ki
u PReg Kp
u LdObs Kp
u LdObs Ki
Alt Encoder EPR
xxx
Encoder EPR
xxx
Motor Poles
407
System BW
906
1000
1006
1010
Pri Vel Fb Sel
Alt Vel Fb Sel
Alt Fb GnScale
System BW
901
Load Ratio
906
System Damping
907
LdObs Mode
2020
2154
1973
c Trq LPF BW
c Accel FF Gain
1002
1004
1928
c Vel Fb LPF BW
c Vel Fb LPF Gn
c Vel Comp Gain
Automatic
Calculations
2155
1974
u Trq LPF BW
u Accel F F Gain
1003
1005
u Vel Fb LPF BW
u Vel Fb LPF Gn
1929
u Vel Comp Gain
To Control
Loops
000
= Read Only
000
= User Entered
Kpi
Kvp
Kvi
Kpp
Kop
Koi
Kaff
Trq LPF BW
VelFb LPF BW
AltVelFbLPF BW
Vel Comp Gain
1009
1022
u AltVelFbLPF BW
u AltVelFbLPF Gn
1008
1021
c AltVelFbLPF BW
c AltVelFbLPF Gn
1959
1760
c Alt Kvi OL Fb
c Vel FF Gain
1960
1761
u Alt Kvi OL Fb
u Vel FF Gain
2
1
sJ
T
PI
s
PI
s
Fs
K
T
P
REG
V
REG
Velocity
Feedback
Filter
Position
Feedback
Velocity
Estimate
Feed
Forwards
Kvff Kaff
Position
Command
LP
LL
N
Torque Loop Filters
Load Torque
Load
Observer
K
J
Torque
Estimate
Adaptive
Tuning
RN
System Under Control
P
REF
 Loading...
Loading...


