Rockwell Automation Publication 750-AT006D-EN-P - January 2022 29
Chapter 2 Product Features
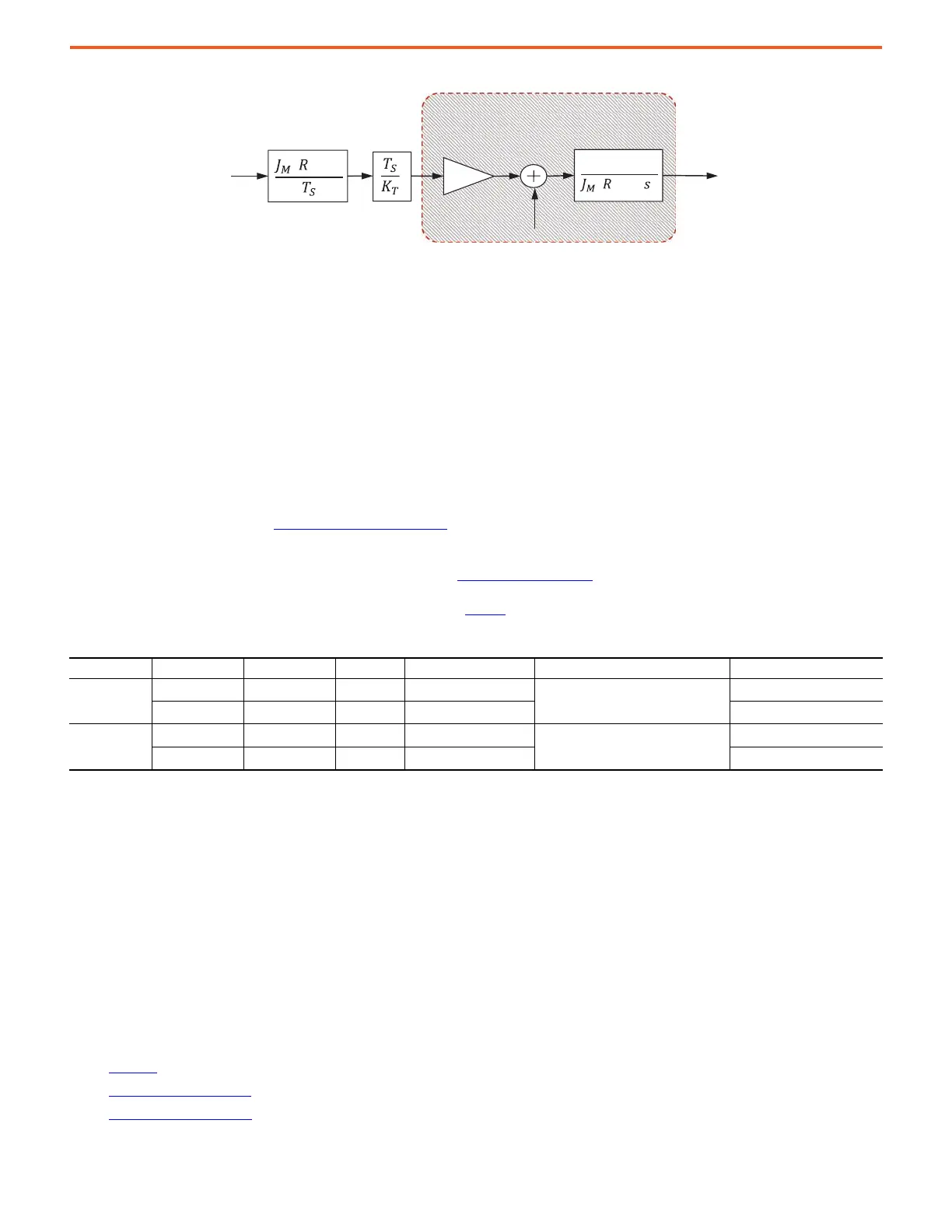
Figure 27 - Torque Scaler Calculation
For rigid systems, the load ratio R > 0 is calculated by autotune or it is a known positive nonzero value and J
T
= J
M
*(R+1). For non-rigid
systems or when the load is unknown, the load ratio R = 0 and J
T
= J
M
.
10:902 [Load Coupling] – This parameter reflects the type of mechanical coupling between the motor and load. It adjusts calculated control
loop gains during an autotune bandwidth calculation test.
• 10:902 [Load Coupling] = Rigid (0) is where the load consists of few mechanical components with direct connection to the motor
shaft. The components are high performance, have no flex, or twist, and misalignment is not likely to occur. This setting is used for
high-performance machines.
• 10:902 [Load Coupling] = Compliant (1) is a non-rigid load where position misalignment, backlash, and flexing of couplings, gearboxes,
belts, and shafts can occur which creates an indirect connection of the load to the motor shaft. This setting is common for most
machines.
The term out-of-box refers to default control loop gain settings that are pre-configured in a new drive. Because the load is unknown at this
point, the motor is assumed to be unloaded, the load ratio R = 0, and the load coupling is compliant. This configuration also applies when the
load is known to be compliant. See Out-of-Box Tuning
on page 55 for more information.
However, when the load is known or an autotune total inertia test has been performed to determine the load ratio, the control loop gains are
configured for a load ratio R > 0 and the load coupling is rigid. See Auto Tuning
on page 63 for more information. This value is the primary
difference affecting out-of-box and autotune rules. Thus, the term out-of-box implies a compliant load with R = 0 and the term autotune
implies a rigid load with R > 0. Recommended settings are shown in Table 7
.
Other considerations are given:
• The motor torque constant K
T
actual value in the motor changes over time. It decreases as the motor heats up.
Load Observer
The load observer feature is a control loop inside the drive that estimates the mechanical load on the motor and compensates for it while the
drive is running. This feature allows for high performance and control loop tuning simplicity similar to that of a mechanically disconnected
motor. Its primary function is to:
• Automatically compensate for unknown inertia, compliance, and low frequency resonance
• Automatically compensate for disturbances and changing inertia
• Force consistent dynamic behavior, which makes the drive easy to tune
This section includes:
• Benefits
• How It Works on page 30
• Configuration on page 31
Table 7 - Recommended Load Ratio Settings
Control Mode Load Coupling Tuning Case Load Ratio Torque Scaler Load Observer Mode Load Observer Bandwidth
Velocity
Compliant Out-of-box R = 0
K
J
= J
M
/T
S
Load Observer Only
K
OP
= K
VP
Rigid Autotune R > 0
K
J
= J
M
*(R+1)/T
S
K
OP
= K
VP
Position
Compliant Out-of-box R = 0
K
J
= J
M
/T
S
Load Observer with Velocity Estimate
K
OP
= 4*K
VP
Rigid Autotune R > 0
K
J
= J
M
*(R+1)/T
S
K
OP
= K
VP
Torque Scalar (
K
J
)
( +1)
1
( +1)
2
K
T
Motor and
Load
Mechanics
Motor
Electrical
Load
Torque
System Under Control
Motor
Position
 Loading...
Loading...


