58 Rockwell Automation Publication 750-AT006D-EN-P - January 2022
Chapter 3 Out-of-Box Tuning
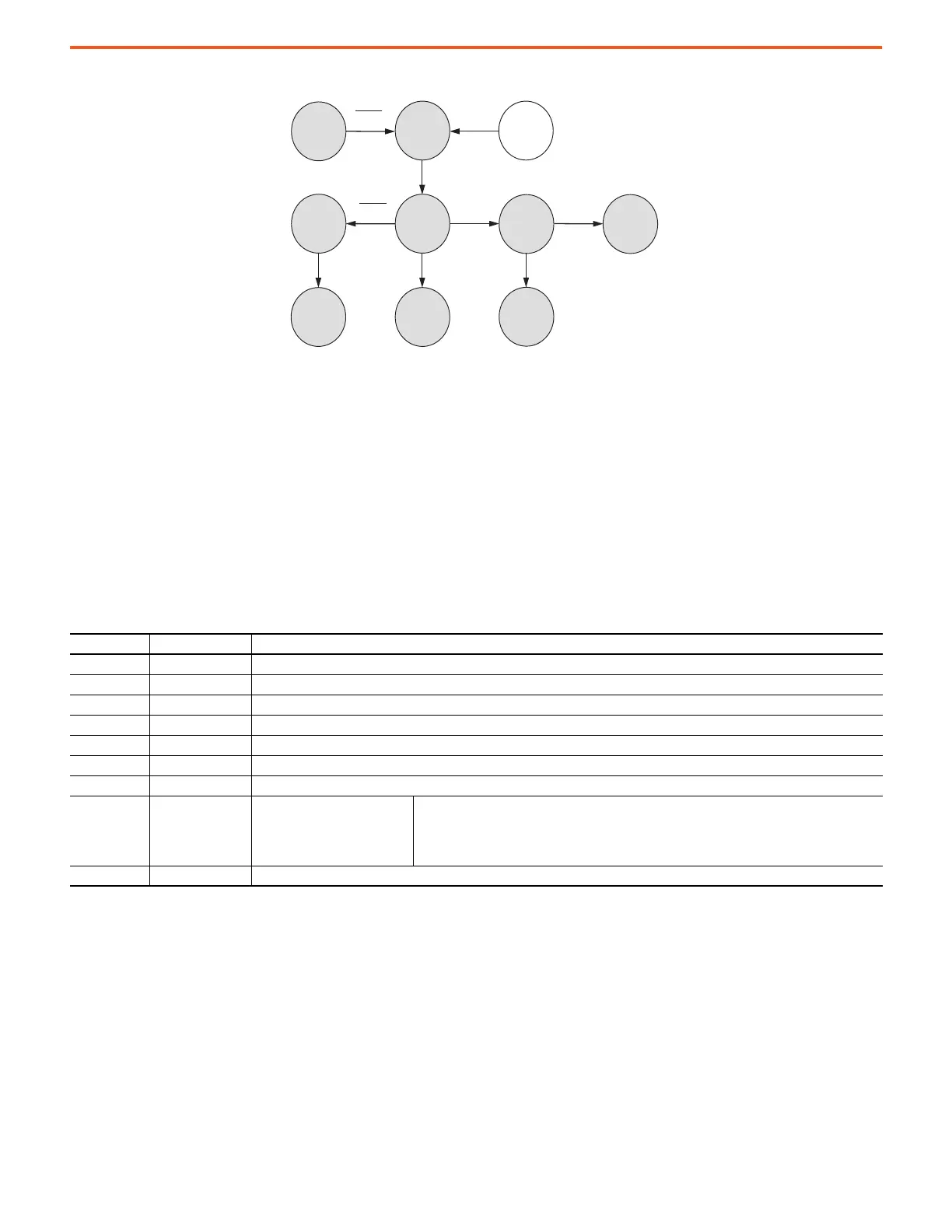
Figure 59 - Out-of-Box Gain Relationships for Load Observer with Velocity Estimate
Other Considerations
• When the torque low-pass filter is enabled, set the bandwidth to greater than five times K
VP
or K
OP
, whichever is larger. This value
helps prevent additional phase lag created by the low-pass filter from being introduced into the system, which causes instability.
• When R is entered higher than the actual load ratio, K
VP
is artificially lower than its actual bandwidth. When R is entered lower than the
actual load ratio, K
VP
is artificially higher than its actual bandwidth.
Recommended Default Settings
This section describes how to configure a new drive. This method often yields satisfactory performance where no further tuning
intervention is required. Follow these steps to configure the drive for relatively high performance out-of-the box.
1. Enter the following parameters for the motor that is connected to the drive.
Parameter No. Parameter Name Description
10:400 [Motor NP Volts] Enter the motor nameplate rated volts.
10:401 [Motor NP amps] Enter the motor nameplate rated full load amps.
10:402 [Motor NP Hertz] Enter the motor nameplate frequency in units of [Hz].
10:403 [Motor NP RPM] Enter the motor nameplate speed in units of [RPM].
10:405 [Mtr NP Pwr Units] Enter the motor nameplate power units [0 = Hp, 1 = kW]
10:406 [Motor NP Power] Enter the motor nameplate power in the respective units from 10:405 [Mtr NP Pwr Units].
10:407 [Motor Poles] Enter the number of motor poles (p). It is calculated as follows: p = round (120 x [Motor NP Hertz] / [Motor NP RPM])
10:900 [Motor Inertia]
Enter the motor inertia from the
nameplate or from the motor
data sheet in units of [kg•m
2
].
• Divide [lb•ft
2
] or [WK
2
] by 23.73 to convert to [kg•m
2
].
If data is not available, use the following equation to approximate 10:900 [Motor Inertia].
J
M
= (Motor Hp/250) * [(Motor Hp/500) + 1]
• Multiply [kW] by 1.341 to convert to [Hp].
10:1000 [Pri Vel Fb Sel] Enter the 2-digit port location followed by the 4-digit parameter number of the primary feedback device.
0
0
2
4Z
2
4
1
Z
0
5
1
2
4
1
Z
2 Hz
(Open Loop
Virtual Encoder
 Loading...
Loading...


