Rockwell Automation Publication 750-AT006D-EN-P - January 2022 35
Chapter 2 Product Features
How It Works
Adaptive tuning is always running in the background to detect motor side resonances. Every second, it analyzes the frequency response of
torque loop signals to identify, track, and measure resonances. It also analyzes the frequency response of command signals to make sure
that dominant command frequencies are not mistaken for resonances. This technique is known as command rejection. The action taken to
adaptively change tuning parameters largely depends on the adaptive tuning mode of operation. This approach is covered in Configuration
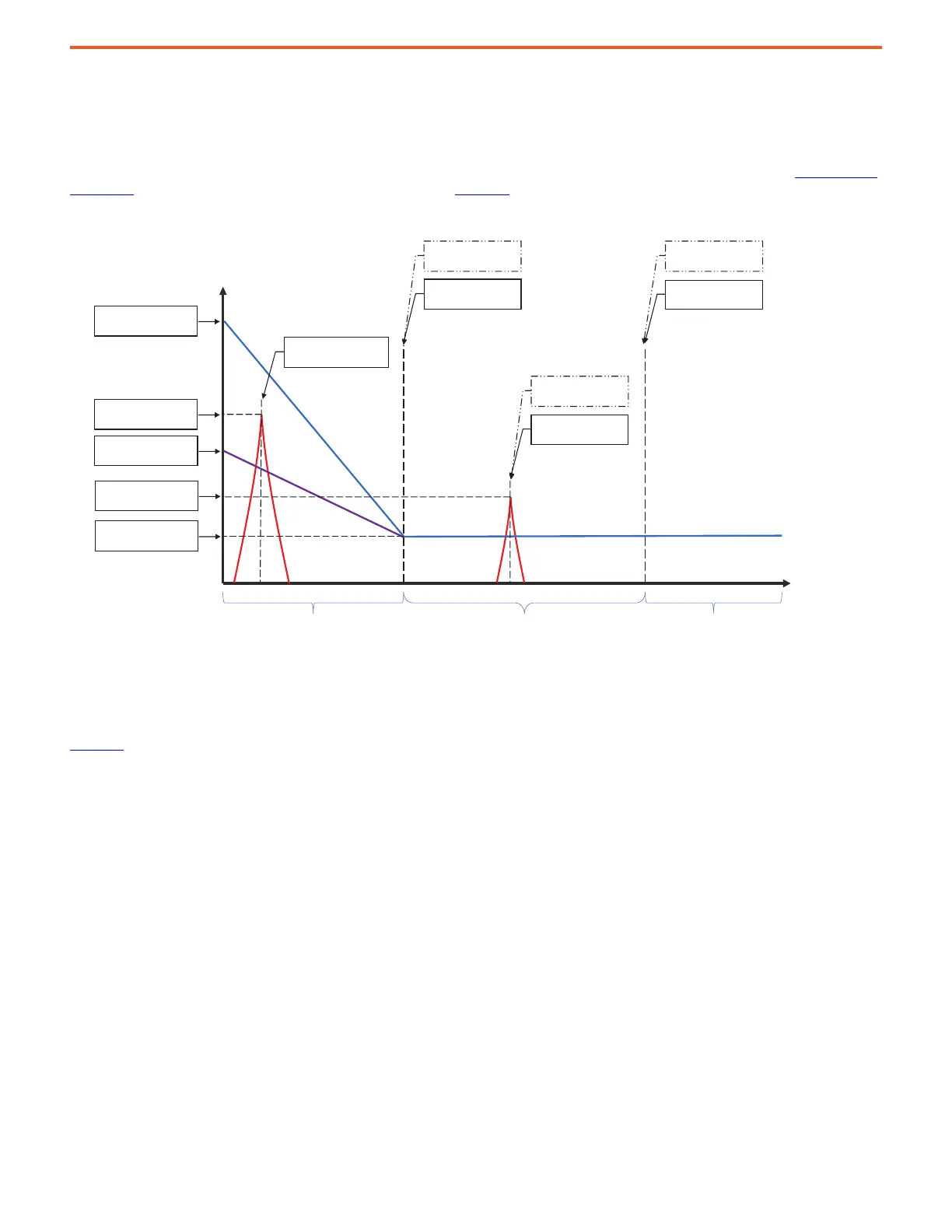
on page 35. An overview of how adaptive tuning works is shown in Figure 35.
Figure 35 - Adaptive Tuning Overview
Configuration
Figure 36 shows parameters that are relevant to adaptive tuning.
P.U Torque Ref,
Magnitude [%]
Frequency
[Hz]
Low Freq. range where
Gain Stabilizaon de-tunes and
Gain Opmizaon up-tunes
High Freq. range where
Tracking Notch sets
torque notch filters
High Freq. range where
Gain Stabilizaon
sets torque LPF
P2112
Trq NF Freq LLim
P2113
Trq NF Freq HLim
P2123
Trq NF Freq Est
P2129
AdptTuneStabFreq
P2135
GnOpt TorqueLim
P2134
GnStab TorqueLim
P2124
Trq NF Mag Est
P2130
AdptTuneStabMag
P2111
Trq NF Threshold
P2114
Trq NF WidthMin
P2115
Trq NF WidthMax
P2125
Trq NF Wdth Est
 Loading...
Loading...


