60 Rockwell Automation Publication 750-AT006D-EN-P - January 2022
Chapter 3 Out-of-Box Tuning
c. If you cannot initiate motion to rotate the load, then run 10:910 [Autotune] = Static MtrID (2) to measure the motor electrical
parameters.
d. Run 10:910 [Autotune] = Rotate MtrID (3). Run it once more for better accuracy. The algorithm will use the values obtained from the
previous autotune as a starting point.
6. Set the current regulator bandwidth 10:445 [VCL CReg BW] =
127 when 10:425 [PWM Frequency] = 1.33 kHz (from step 2
)
250 when 10:425 [PWM Frequency] = 2 kHz (from step 2
)
375 when 10:425 [PWM Frequency] = 4 kHz (from step 2
)
7. Run 10:910 [Autotune] = InertiaMotor (4) with the load disconnected
to measure 10:900 [Motor Inertia]. This step is only an option if the
load can be disconnected to run the test. Otherwise, skip this step.
8. Run 10:910 [Autotune] = BW Calc (6). This mode calculates the following parameters based on motor inertia, load ratio, and motor
parameters entered in previous steps. This mode does not initiate motion.
9. Adjust 10:2112 [Trq NF Freq LLim] to a value that is at least 2…3 times the value of 10:906 [System BW]
10. Set 10:1019 [Fb Loss Action] to one the following velocity feedback loss switchover functions:
• Primary Only (0) - Use primary feedback source exclusively (default value)
• Alt Only (1) - Use alternate feedback source exclusively
• Auto Tach SW (2) - Switch from primary to alternate upon loss of primary
The primary and the alternate feedback can be an encoder connected to an encoder module or the Open Loop Virtual Encoder.
11. Adjust 10:2112 [Trq NF Freq LLim] to a value that is at least 2…3 times the value of 10:906 [System BW]
12. Run the drive and adjust 10:906 [System BW] if necessary. It initiates motion
and rotates the load. Decreasing 10:906 [System BW]
stabilizes the system and increasing it improves performance. Typically, high gain results in a quicker response time, but excessive
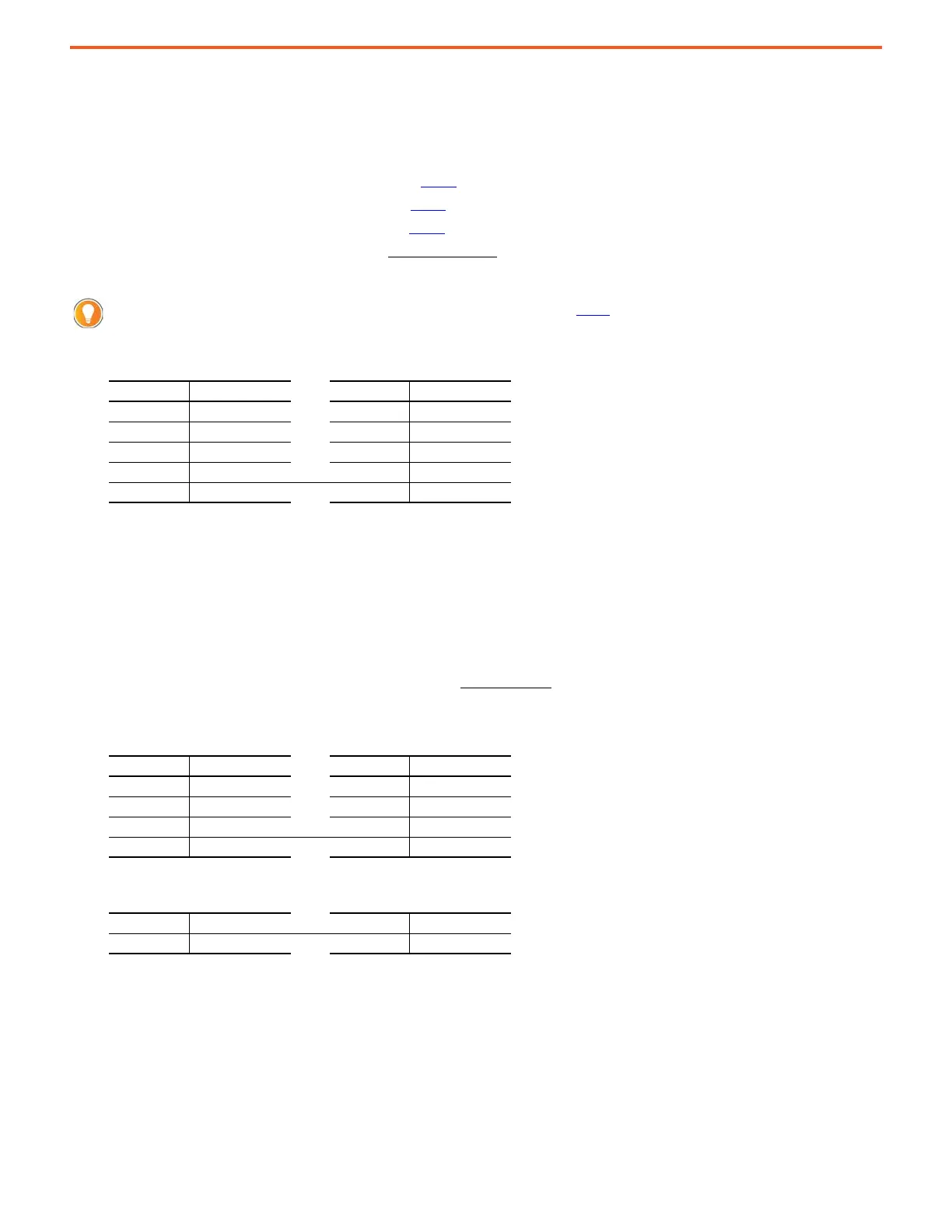
gain causes system instability. The following parameters are automatically calculated as functions of system bandwidth, load
observer mode, and load ratio.
The following parameters are automatically calculated as functions of system bandwidth, alternate feedback gain scale, and motor
parameters.
If 10:1019 [Fb Loss Action] = Auto Tach SW (2), you can also adjust the system performance when the drive operates with the alternate
feedback in case of feedback loss. To make this adjustment, do the following:
Temporarily set 10:1019 [Fb Loss Action] = Alt Only (1) and adjust 10:1010 [Alt Fb GnScale] to the desired performance. After the
performance with the alternate feedback is adjusted, set 10:1019 [Fb Loss Action] back to Auto Tach SW (2).
This step can be skipped if the actual motor nameplate inertia was entered in step 1.
Parameter No. Parameter Name Parameter No. Parameter Name
10:906 [System BW] 10:1899 [Vel Limit Neg]
10:1010 [Alt Fb GnScale] 10:1965 [Accel Limit Pos]
10:1392 [Max Speed Fwd] 10:1966 [Accel Limit Neg]
10:1393 [Max Speed Rev] 10:2083 [Torque Limit Pos]
10:1898 [Vel Limit Pos] 10:2084 [Torque Limit Neg]
Parameter No. Parameter Name Parameter No. Parameter Name
10:1754 [c PReg Kp] 10:2021 [c LdObs Kp]
10:1756 [c PReg Ki] 10:2023 [c LdObs Ki]
10:1955 [c VReg Kp] 10:2154 [c Trq LPF BW]
10:1957 [c VReg Ki] — —
Parameter No. Parameter Name Parameter No. Parameter Name
10:1002 [c Vel Fb LPF BW] 10:1008 [c AltVelFbLPF BW]
 Loading...
Loading...


