1. Clean the alarm
Set F0-00=1 to reset the alarm. When the alarm occurred, please find out the alarm reasons then clean
the alarm.
2. Back to out of factory settings
Set F0-01=1, then press ENTER. No need to re-power the servo drive.
3. Clean the offset
Set F0-02=1 to clean the offset.
4-4-2. F1-XX
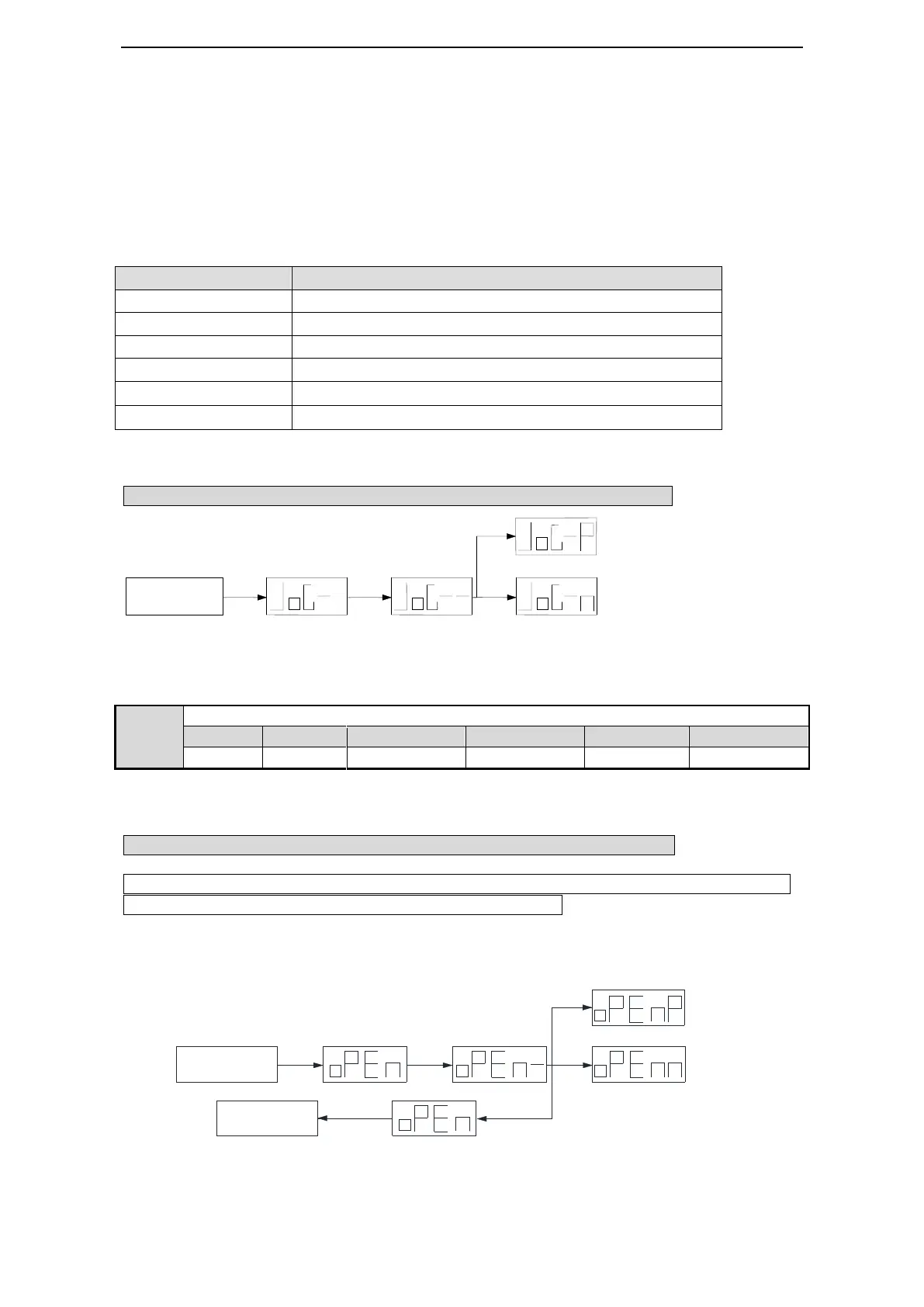
1. Jog (F1-00)
Make sure that the motor shaft is not connected to the machine before jogging!
When the servo is in jog run mode, gain and other parameters will join the process. Please adjust the
parameters according to the jog run status.
2. Test run (F1-01)
Make sure that the motor shaft is not connected to the machine before test run!
When servo drive is connected with non-original encoder line or power line, test run must be run first
to ensure that the encoder line or power line is connected correctly.
Test run can detect the connection of power line and encoder feedback. Please operate the servo as the
following steps. If the motor shaft jitter or servo alarm, please cut off the power at once then check the
wiring.
3. Current sampling zero (F1-02)
After the servo drive updated to latest software version, or the motor does not revolve smoothly for
long time, the current offset auto-adjustment is recommended.
 Loading...
Loading...



