Speed command limit
5-4-3. Speed command difference auto-adjustment (F1-03)
When the servo is in analog voltage speed mode, even if the command voltage is 0V, motor will run at
very low speed. The micro-motion will happen when the command voltage micro-offset (mV) of host
controller or external circuit occurs. Auto-adjust the command offset by operate panel of servo.
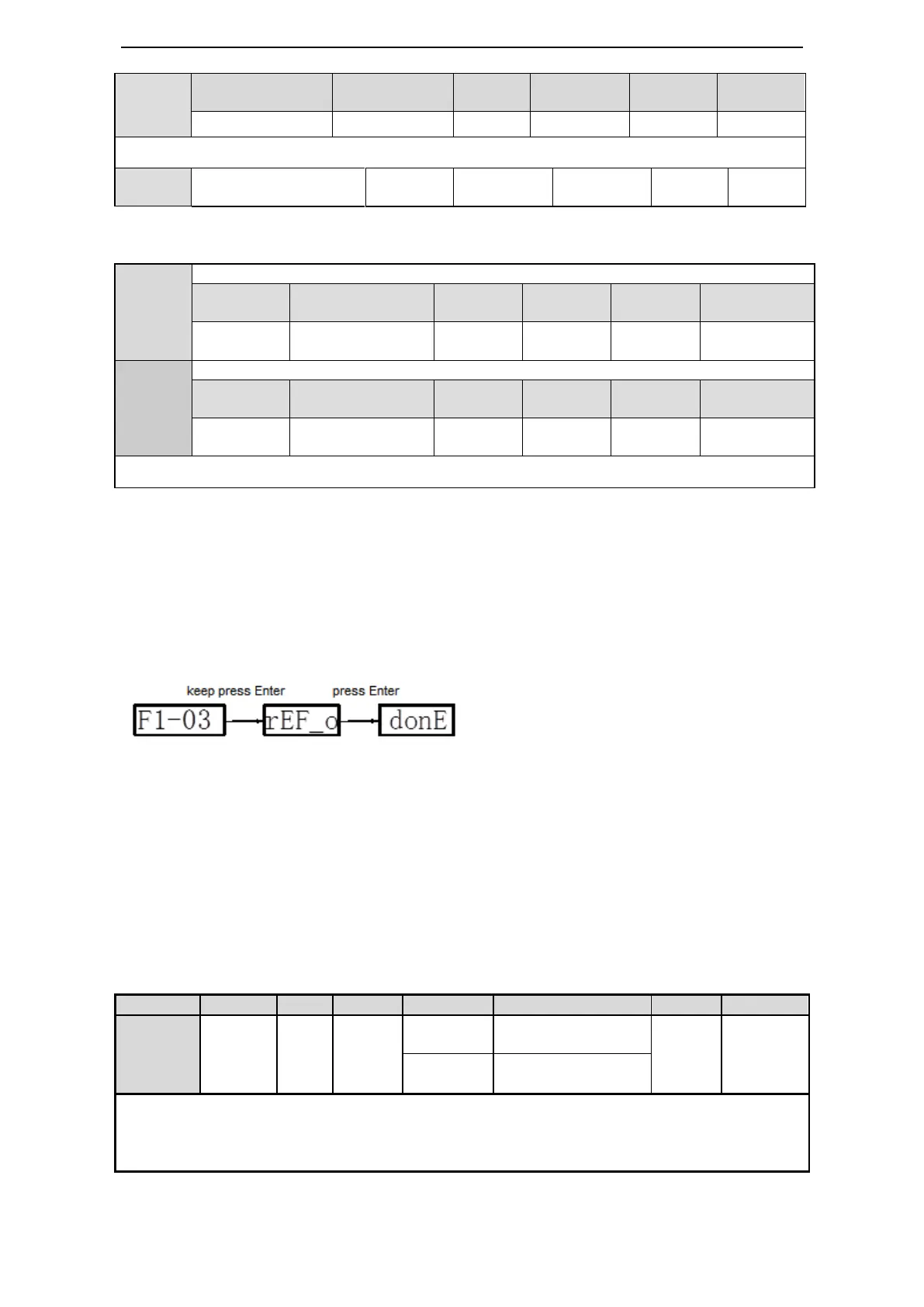
Take away the analog signal from servo CN1 port in servo bb state (not enabled), then do the following
steps:
Press STATUS/ESC to exit this function.
Note:
1. The present analog voltage is 0V, please follow the above steps to calibrate, so 0V is 0rpm,
motor will reverse run below 0V, motor will forward run above 0V. If the present analog
voltage is 5V, and follow the above steps to calibrate, so 5V is 0rpm, motor will reverse run
below 5V, motor will forward run above 5V.
2. If there is still micro-motion after calibrating, please increase P3-03(set to 5 means the dead
area voltage is 0.005V) or use zero-clamp.
5-4-4. Proportion action command (/P-CON)
1. /P-CON is the speed control mode signal selected from PI (proportion integral) and P (proportion).
2. If set to P control mode, the motor rotate and micro-vibration caused by speed command input drift
can be decreased. But the servo stiffness will decrease.
3. /P-CON signal can be distributed to input terminal via parameter P5-21. Refer to chapter 5-12-1.
Analog command wiring diagram please refer to chapter 3-2-3
Analog speed direction
switching
Forward max speed command limit
Reverse max speed command limit
Note: P3-14 and P3-15 are effective in all the modes.
 Loading...
Loading...



