0: Inertia run stop, keep inertia movement after stop
2: deceleration stop, keep inertia movement after stop
1. the stop mode is 0. the motor will inertia stop until the speed is less than P5-03 (rotate
detection speed) then change to free stop when servo OFF or alarm. At the same time, the servo will
count the inertia stop time. If the time is larger than P0-30 but the motor speed is not smaller than
P5-03, servo will free stop and show stop time out alarm.
2. the stop mode is 2. The motor will produce a brake torque P3-32 and deceleration stop until the
speed is less than P5-03 then change to free stop when servo OFF or alarm. At the same time, servo
will count the inertia stop time. If the time is larger than P0-30, but P5-03 is not smaller than P5-03,
servo will free stop and show stop time out alarm.
Stop mode when overtravel
Motor stop mode when overtravel
Deceleration stop, the torque is 0 in overtravel direction after stop, receive command.
Inertia stop, the torque is 0 in overtravel direction after stop, receive command.
Deceleration stop, not receive command in overtravel direction after stop.
1. The brake torque is P3-32 when deceleration stop and stop time out time is effective for
overtravel process.
2. there is position offset pulse when the motor stop by overtravel signal in position control mode. The
position offset can be cleaned by inputting the signal /CLR. If the servo still can receive the pulse, the
pulse will accumulate until the servo alarm.
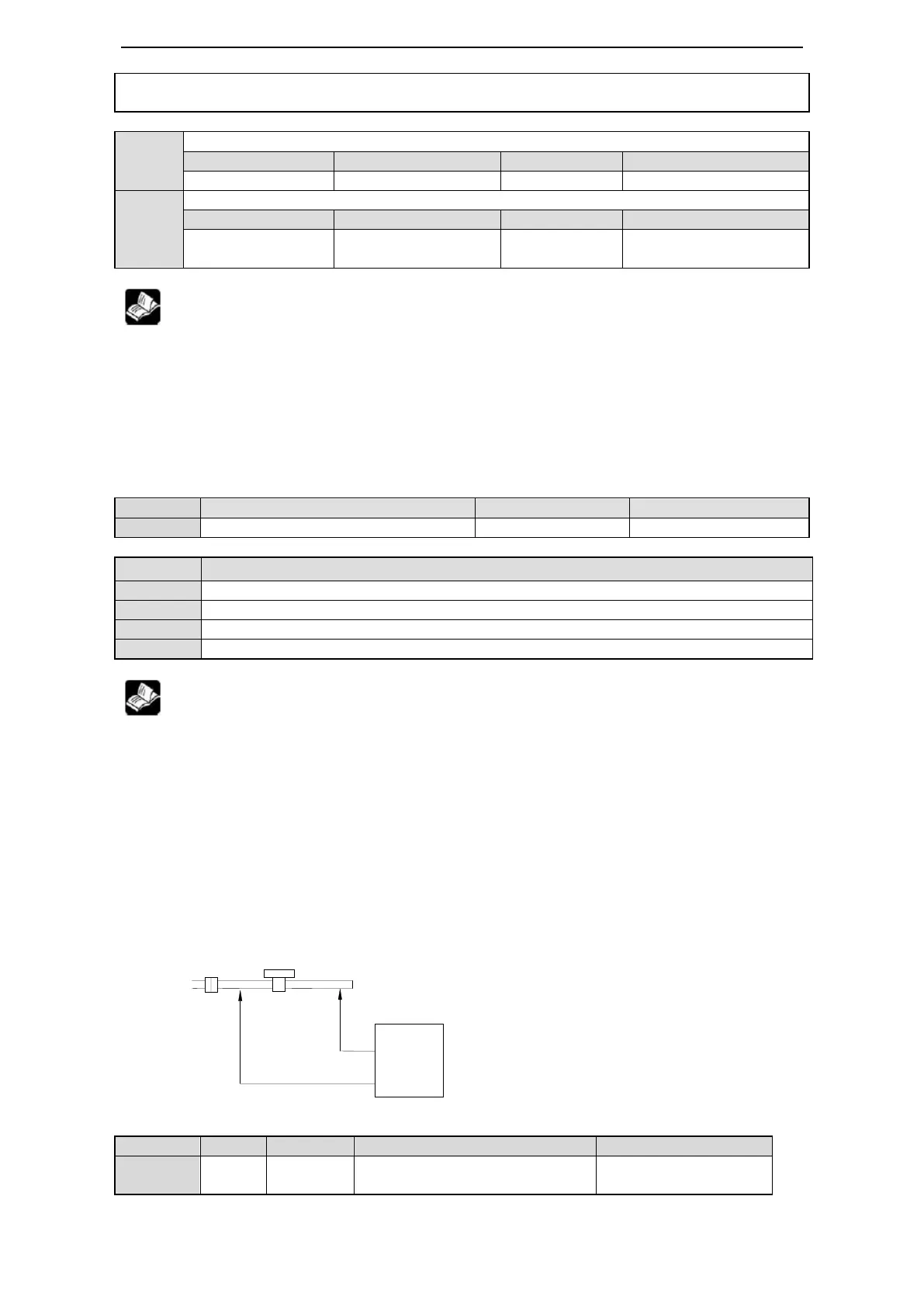
5-2-4. Overtravel Limit (P-OT & N-OT)
(1) Use the overtravel signal
Please connect P-OT and N-OT to the limit switch. Make sure to wiring as the following diagram when
linear driving to avoid machine damagement.
(2) Set the overtravel signal
SI3=ON, prohibit the forward
running
 Loading...
Loading...



