5-11-4. Hysteresis loop
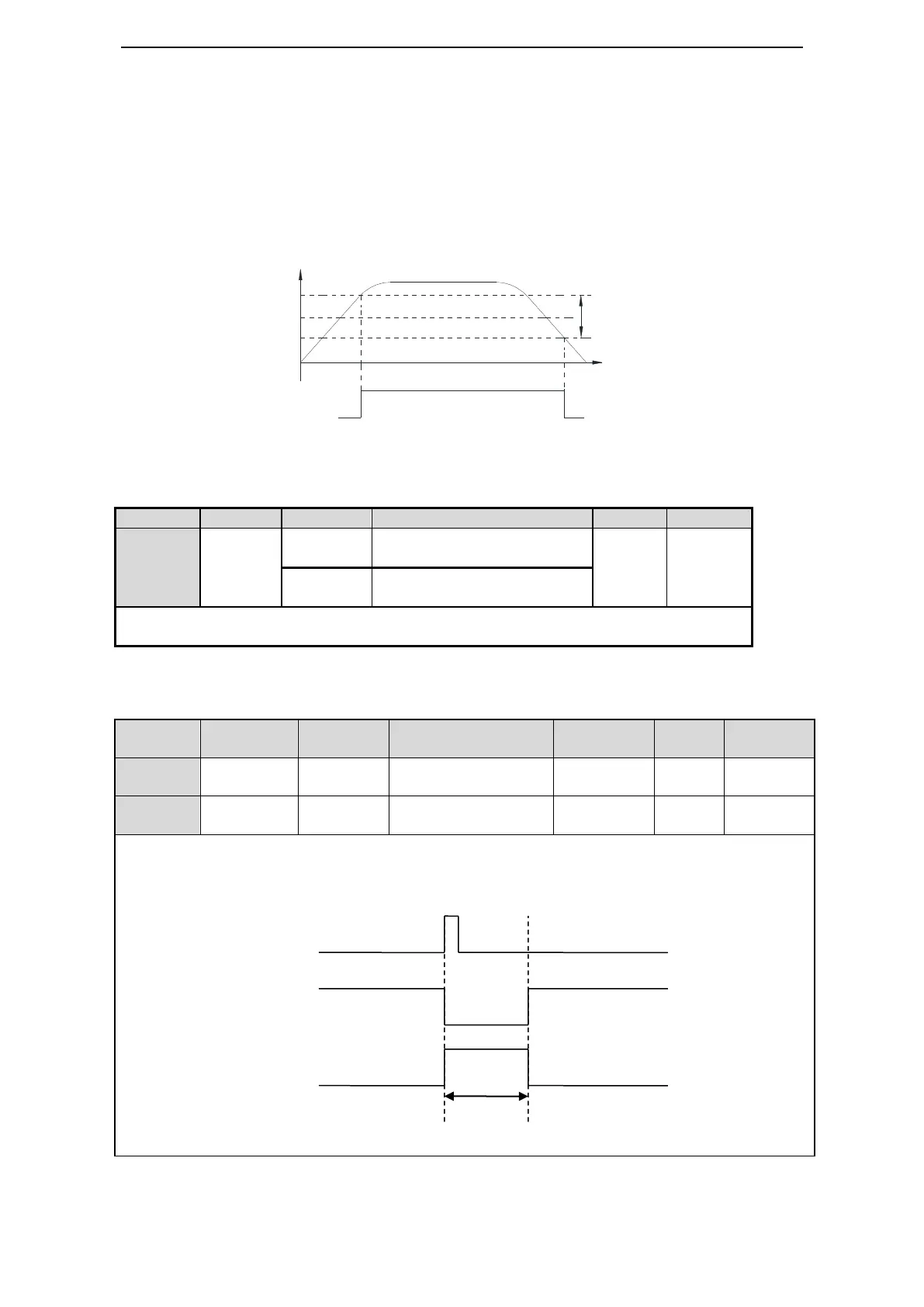
The hysteresis loop can prevent the system oscillation caused by parameter fluctuating around certain
value. There is hysteresis loop width after setting the hysteresis loop value. It will act when the
parameter is larger than certain value. It will release the action when the parameter is smaller than
another value. The loop width decides the interval time of action. The action is sensitive and frequent
for small loop width. The action is slow for large loop width. Please note that rotation detection speed
(P5-03), same speed detection speed (P5-04), reach detection speed (P5-05) all have 10rpm hysteresis
loop. For example, P5-03 set to 50, rotation detection/TGON output terminal is SO3.
5-11-5. Servo ready (/S-RDY)
It will output /S-RDY signal when servo power on and no alarm.
5-11-6. Encoder Z phase output (/Z) (only for DS3-PQA/DS3-PTA)
Default not distribute
to terminal
1. /Z signal can be distributed to the output terminal through P5-48, refer to chapter 5-12-3.
2. Z phase signal is single pulse output mode, the default pusle width is 2ms, it can set through P5-19, it
is not related to the motor speed.
SO3 and COM pass through
when servo is ready
SO3 and COM cut off when
servo is ready
The range is 0000-0013. It can distribute to other output terminal through P5-41. Refer to
chapter 5-12-3.
 Loading...
Loading...



