78
5.3.3.3 Position segment 1 to 35 parameter settings
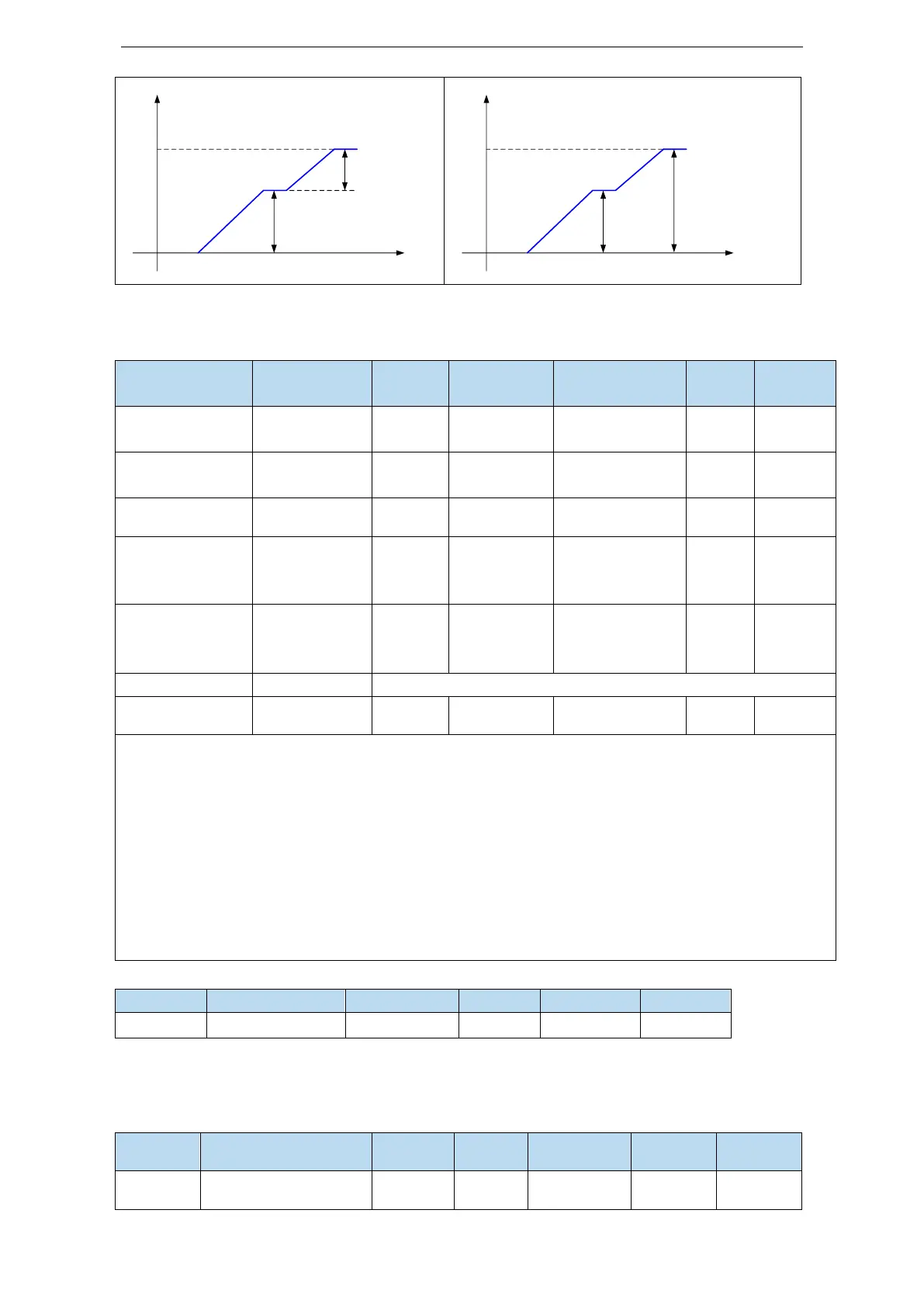
Trapezoid
acceleration
time
Trapezoid
deceleration
time
Notes:
1. Set pulse number = pulse number (high bit) ×10000 + pulse number (low bit).
2. In formula P4-10+(n-1)*7, n is the segment no. of internal position; the range is 1~35. Segment 1~12 can
be set through the operate panel, segment 13~35 needs to write in parameters through communication
(RS232 or RS485).
3. If one of the segment speed is zero, servo will skip this segment and run the next segment.
4. In relative positioning mode, if one segment speed is not zero but the pulse number is zero, the motor
will not run, but the wait mode is effective. The servo will run the next segment when the adjust time is out.
5. In absolute positioning mode, if one segment speed is not zero but the pulse number is zero, the
motor will return to the reference origin with the speed of this segment.
6. In absolute positioning mode, if two consecutive segments speed are not zero, but the pulse number is
the same, the servo motor will not run but the wait mode is effective.
There are 35 sections in total in the internal position. If 10 sections need to be operated and 5 sections
need to be operated switched for use due to process requirements, the effective segment can be set. For
example, parameters are set for sections 1-10, and P4-04 is set to 5, that is, the position of section 1-5 is
valid; if it is set to 10, the position of section 1-10 is valid.
Internal position mode
start segment number
 Loading...
Loading...

