58 Program features
has a rush control function that decreases the torque reference whenever the motor
speed exceeds the set minimum speed or maximum speed.
The function is based on a PI controller. The program sets the proportional gain to 5.0
and integration time to 2.5 s.
Settings and diagnostics
Parameters 30.11 Minimum speed (page 199), 30.12 Maximum speed (page 199)
and 31.30 Overspeed trip margin (page 211).
Events: -
Jogging
The jogging function enables the use of a momentary switch to briefly rotate the
motor. The jogging function is typically used during servicing or commissioning to
control the machinery locally.
Two jogging functions (1 and 2) are available, each with their own activation sources
and references. The signal sources are selected by parameters 20.26 and 20.27.
When jogging is activated, the drive starts and accelerates to the defined jogging
speed along the defined jogging acceleration ramp. After the activation signal
switches off, the drive decelerates to a stop along the defined jogging deceleration
ramp.
The figure and table below provide an example of how the drive operates during
jogging. In the example, the ramp stop mode is used (21.03 Stop mode).
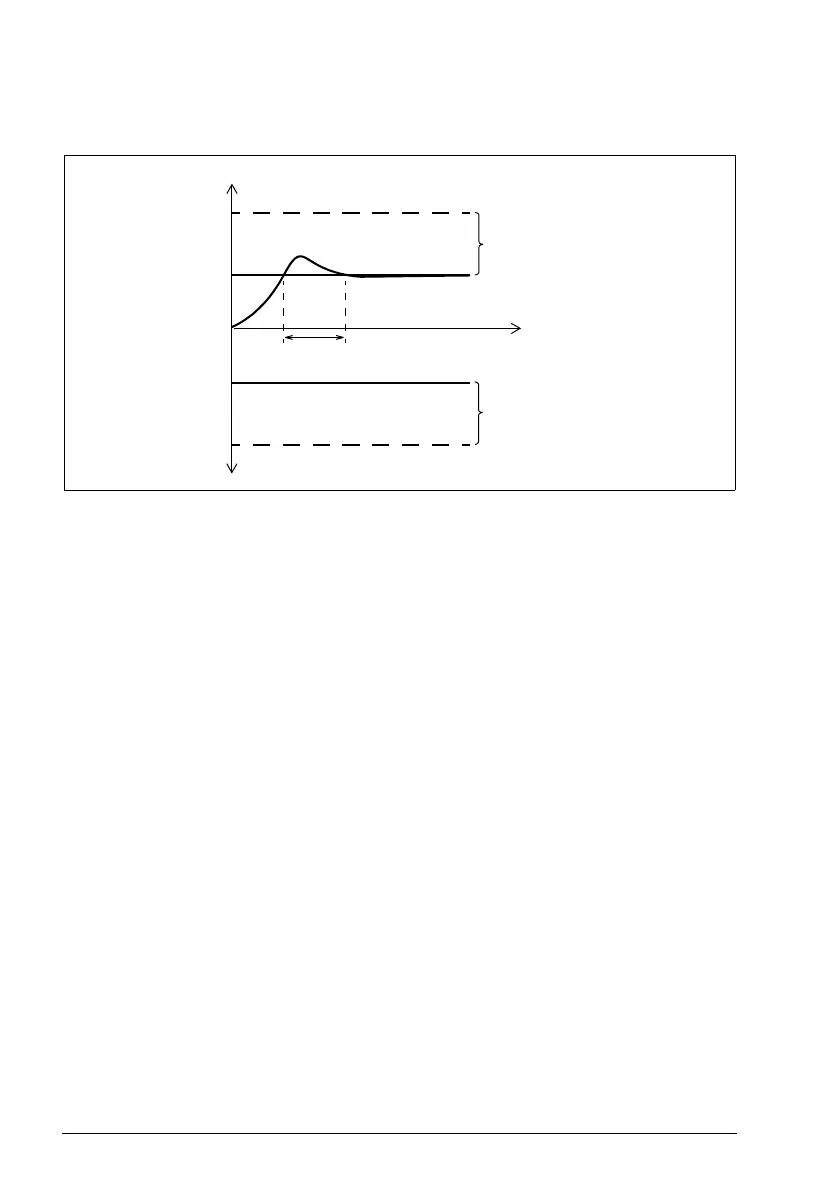
Motor speed
Time
Overspeed trip level
Overspeed trip level
31.30 Overspeed trip margin
0
31.30 Overspeed trip margin
30.12
30.11
Rush control active
ACS180 FW.book Page 58 Tuesday, March 9, 2021 2:25 PM
 Loading...
Loading...













