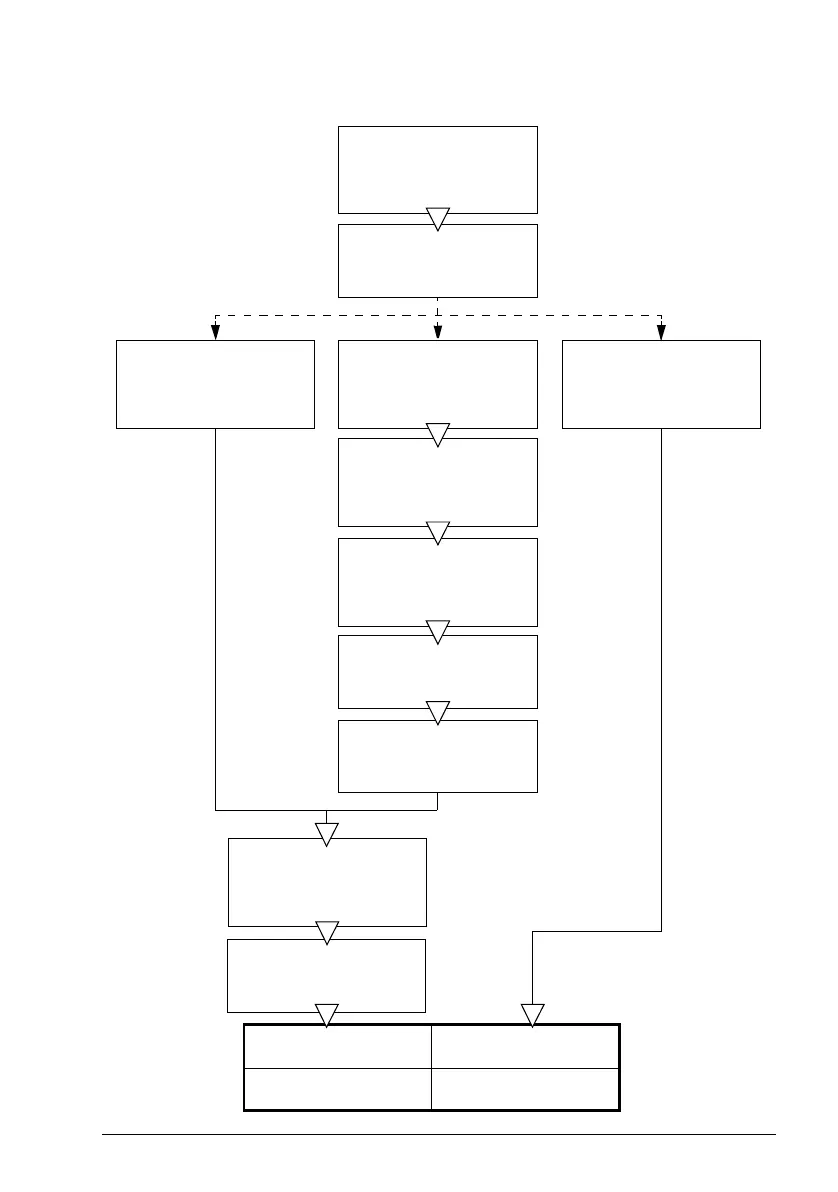
Process PID setpoint and
feedback source selection
Tor que reference
source selection and
modification
Speed reference
source selection I
Frequency reference
source selection and
modification
Speed reference source
selection II
Speed reference ramping and
shaping
Speed error calculation
Vector motor control mode Scalar motor control mode
Speed controller
Process PID controller
To rq u e l i m i t a t i o n
Reference selection for torque
controller
Frequency controllerTorque controller

 Loading...
Loading...










