Standard programposi features 63
The function is based on a PI controller. The proportional gain and integration time
can be defined by parameters. Setting these to zero disables rush control.
Settings
See parameters
• 26.81 Rush control gain
• 26.82 Rush control integration time
Encoder support
The control program supports two single-turn or multi turn encoders (or resolvers).
The following optional interface modules are available:
• TTL encoder interface FEN-01—two TTL inputs, TTL output (for encoder
emulation and echo) and two digital inputs for position latching
• Absolute encoder interface FEN-11—absolute encoder input, TTL input, TTL
output (for encoder emulation and echo) and two digital inputs for position latching
• Resolver interface FEN-21—resolver input, TTL input, TTL output (for encoder
emulation and echo) and two digital inputs for position latching
• HTL encoder interface FEN-31—HTL encoder input, TTL output (for encoder
emulation and echo) and two digital inputs for position latching.
• HTL/TTL encoder interface FSE-31 (for use with an FSO-xx safety functions
module): Two HTL/TTL encoder inputs.
The interface module is installed onto any optional slot on the drive control unit. The
module (except FSE-31) can also be installed onto an FEA-0x extension adapter.
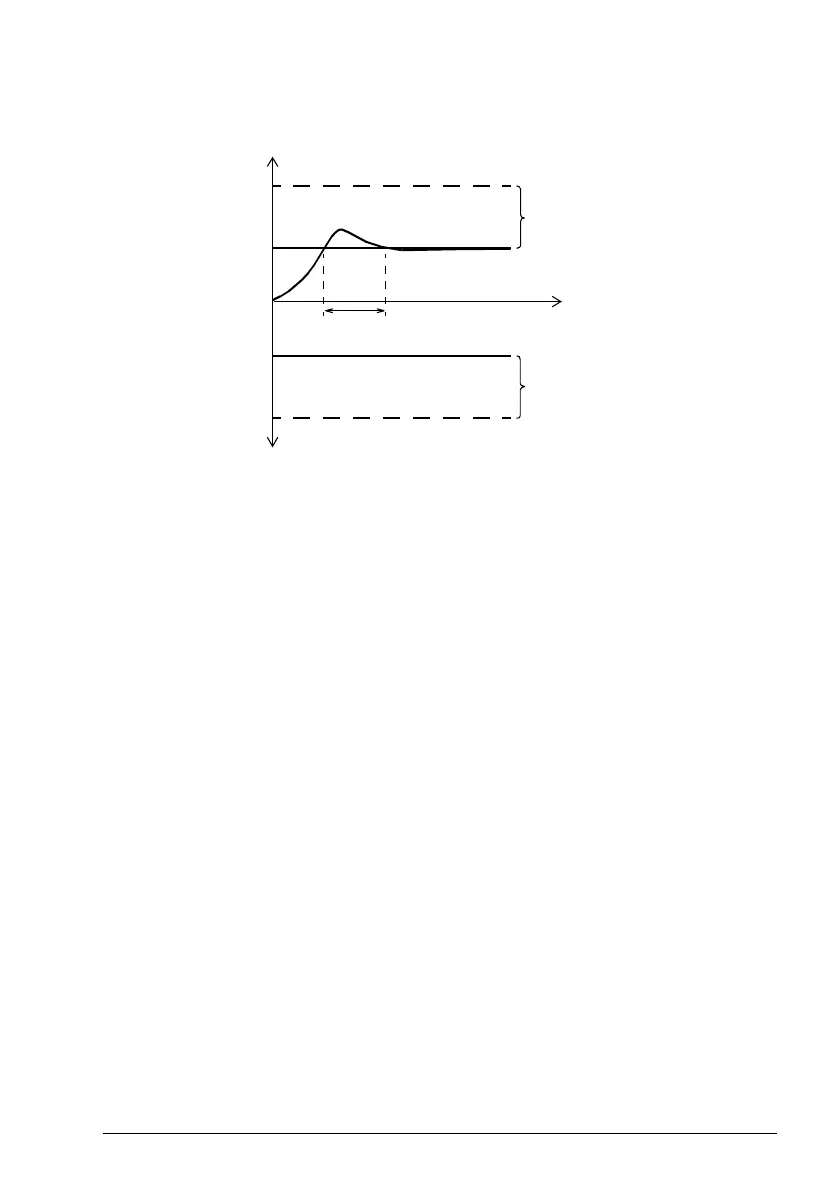
Motor speed
Time
Overspeed trip level
Overspeed trip level
31.30 Overspeed trip margin
0
31.30 Overspeed trip margin
30.12
30.11
Rush control active

 Loading...
Loading...









