Standard programposi features 69
As a result, parameter 90.65 Pos counter init value will be set to 66770.125.
Jogging
The jogging function enables the use of a momentary switch to briefly rotate the
motor. The jogging function is typically used during servicing or commissioning to
control the machinery locally.
Two jogging functions (1 and 2) are available, each with their own activation sources
and references. The signal sources are selected by parameters 20.26 Jogging 1 start
source and 20.27 Jogging 2 start source. When jogging is activated, the drive starts
and accelerates to the defined jogging speed (22.42 Jogging 1 ref or 22.43 Jogging 2
ref) along the defined jogging acceleration ramp (23.20 Acc time jogging). After the
activation signal switches off, the drive decelerates to a stop along the defined
jogging deceleration ramp (23.21 Dec time jogging).
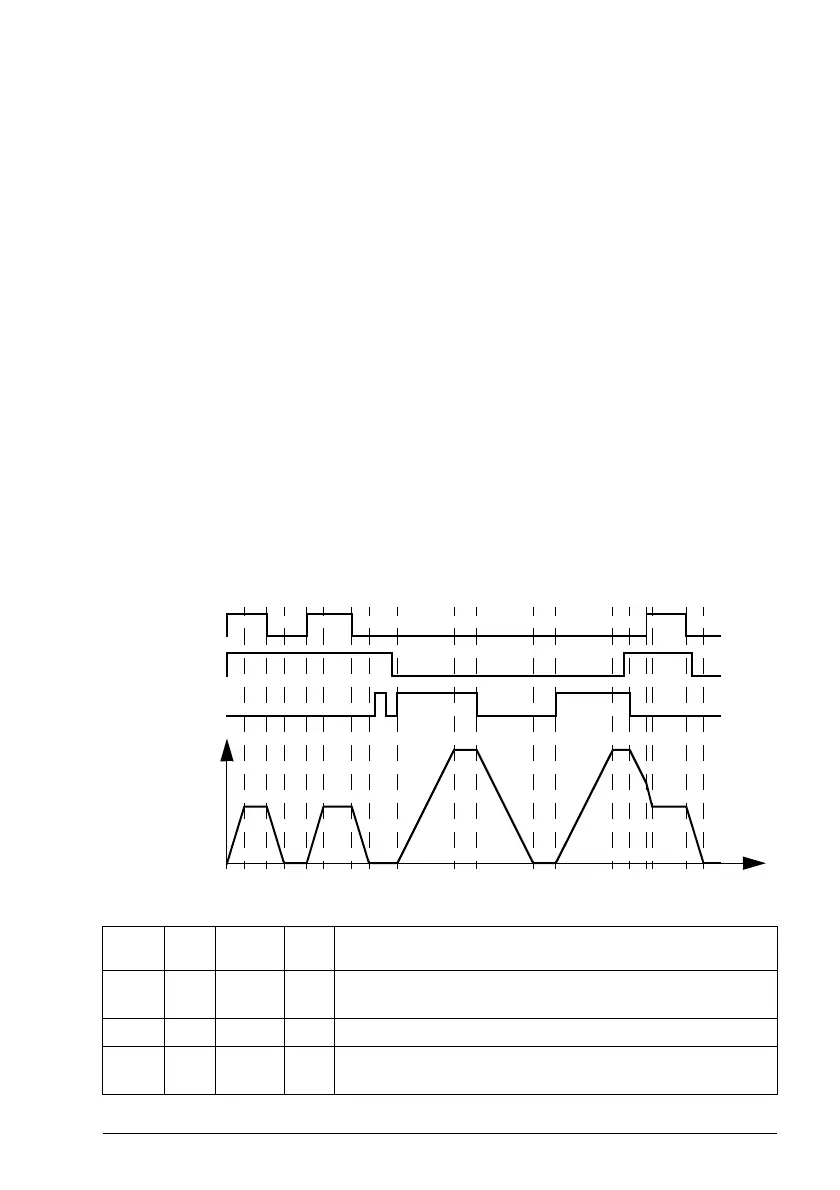
The figure and table below provide an example of how the drive operates during
jogging. In the example, the ramp stop mode is used (see parameter 21.03 Stop
mode).
Jog cmd = State of source set by 20.26 Jogging 1 start source or 20.27 Jogging 2
start source
Jog enable = State of source set by 20.25 Jogging enable
Start cmd = State of drive start command.
Phase
Jog
cmd
Jog
enable
Start
cmd
Description
1-2 1 1 0 Drive accelerates to the jogging speed along the acceleration
ramp of the jogging function.
2-3 1 1 0 Drive follows the jog reference.
3-4 0 1 0 Drive decelerates to zero speed along the deceleration ramp
of the jogging function.
2314568 11 13141516
t
71891210 17
Jog cmd
Jog enable
Start cmd
Speed
 Loading...
Loading...










