Functional Software description
DCS 500 Software Description 77
Start Delay After the start command is given with BR RELEASE-input and the
actual torque has reached the holding torque level, the LIFT
BRAKE output is set. After that during the time START DELAY
(304) the DECEL CMND is active keeping the speed reference in
zero. When start delay has elapsed, speed controller and ramp ge-
nerator are released. (scaling: 1 = 0.01s).
Stop Delay Stop delay is set equal to the closing time of the brake. When
BR RELEASE command is removed, the BRAKE CONTROL -
function block will reset the input of RAMP GENERATOR with
DECEL CMND. When actual speed is low enough, the MIN SP IND
- input is set active. Then LIFT BRAKE - command is removed and
during stop delay, the BRAKE RUN - command will keep the speed
controller operating with zero speed reference. When STOP
DELAY (305) has elapsed, the BRAKE RUN - command is remo-
ved. The mechanical brake is now holding the load by itself.
(scaling: 1 = 0.01s)
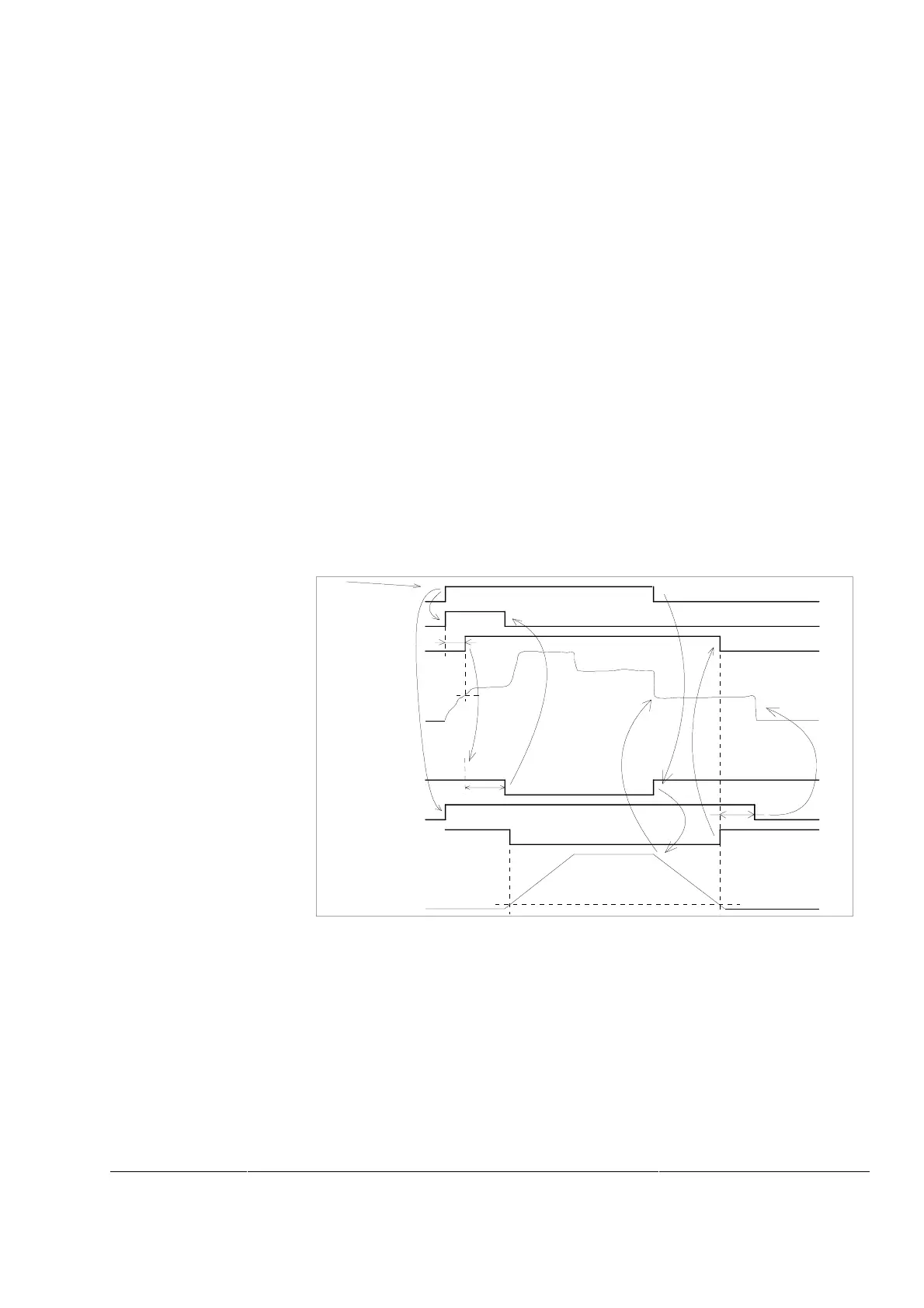
Function Following figure shows the timings of the BRAKE CONTROL in ca-
se of starting and stopping.
BR RELEASE
TREF ENABLE
Torque reference
LIFT BRAKE
START DELAY
SPEED .
DECEL CMND
MIN SPEED L (2201)
Delay until torque has reached desired level
Hold Torque/Hold Ref
BRAKE RUN
STOP DELAY
MIN SPEED (12201)
Figure 51 Brake control function

 Loading...
Loading...