Position of robot
Use this procedure to place the robot in the position recommended in order to
facilitate replacement of motors.
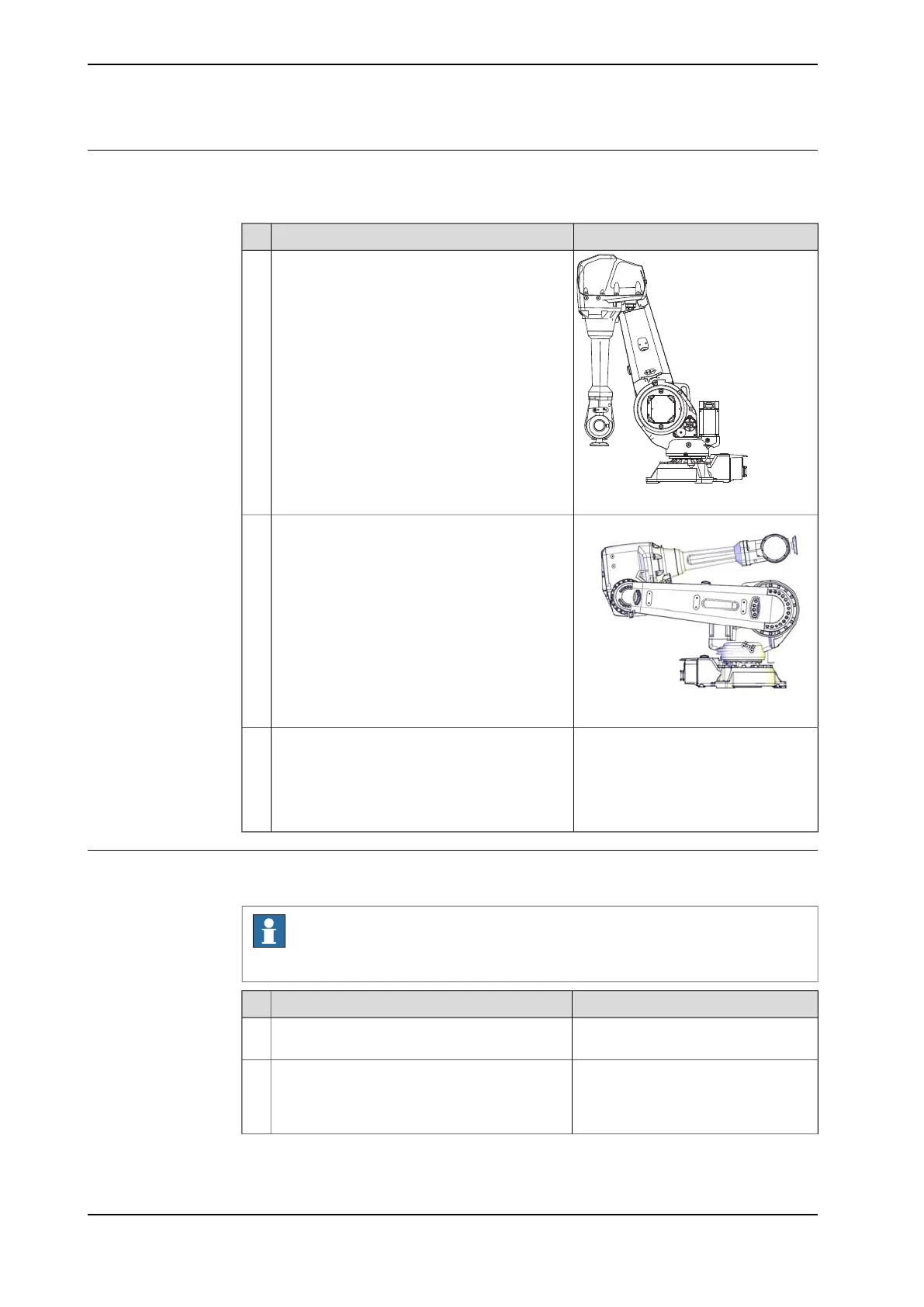
InformationAction
xx0800000388
Axis-1, axis-4, axis-5 and axis-6 motor (IRB
2600 Standard)
Axis-1 and axis-4 motors (IRB 2600ID)
• Move the robot to a position where the
wrist is pointing to the floor, as shown in
the figure. This will make it possible to
remove the motors without draining the
oil from the gearbox.
xx1100000548
Axis-2 motor
• Move the robot to a position where the
lower arm rests firmly on the damper of
axes 2 and 3. Release the brake of axis
2 to be sure that the lower arm rests in
the end position.
Axis-3 motor
• Move axis-2 to 0° and axis-3 to maximal
+. Release the brake of axis-3 to be sure
that the upper arm is completely vertical
and rests against the damper of axis-2
and axis-3.
Draining gearbox
Use this procedure to drain gearboxes, if needed.
Note
Draining of gearbox is only needed when removing the axes 2 and 3 motors.
NoteAction
-Axis-1 motor:
• Draining of gearbox is not needed.
1
How to drain the gearbox is described
in section:
• Changing the oil, axis-2 gearbox
on page 163
Axis-2 motor:
• The gearbox has to be drained before
removing the motor.
2
Continues on next page
308 Product manual - IRB 2600
3HAC035504-001 Revision: Q
© Copyright 2009-2018 ABB. All rights reserved.
4 Repair
4.7.1 Removing motors
Continued
 Loading...
Loading...






