240 Rockwell Automation Publication 2094-UM001J-EN-P - March 2017
Appendix D Configure the Load Observer Feature
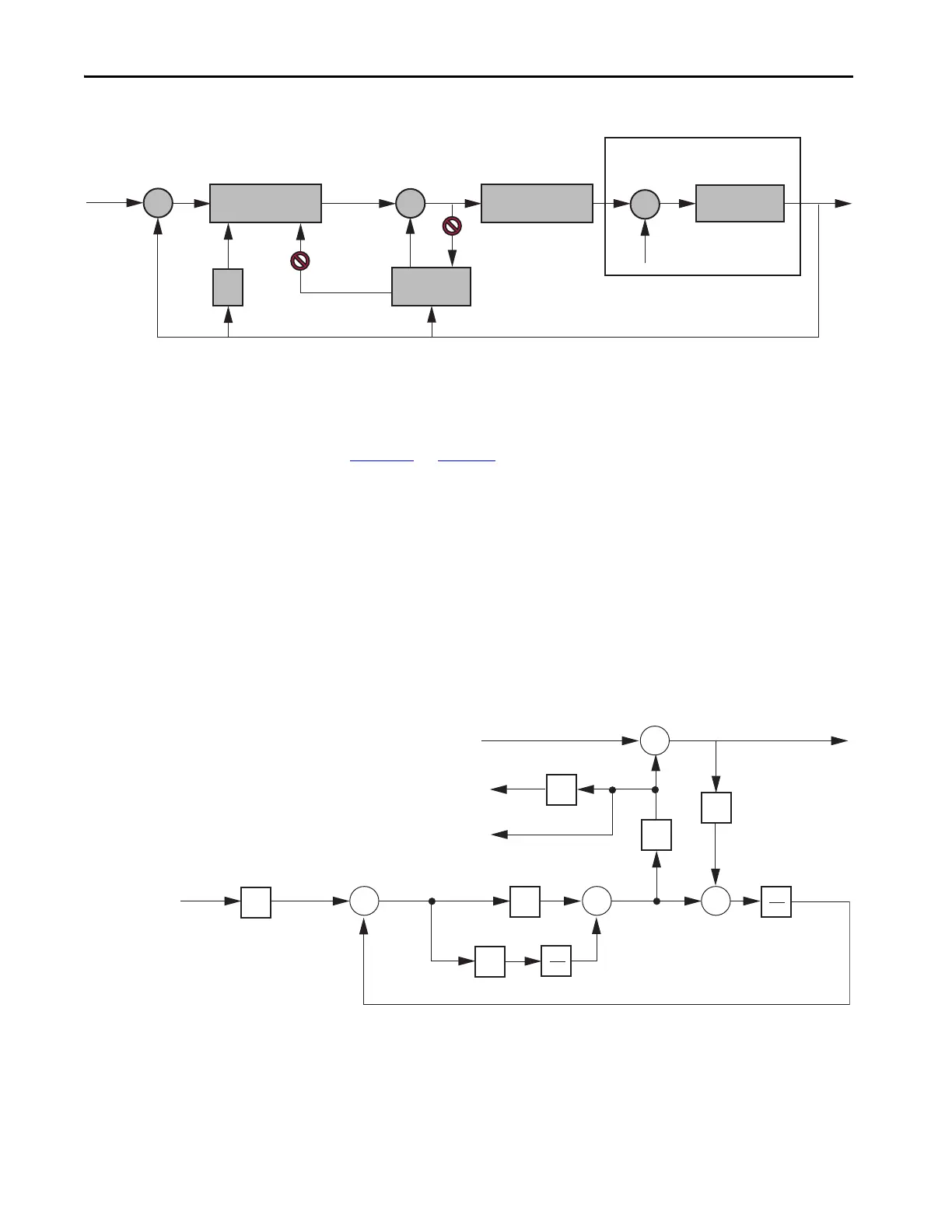
Figure 119 - Acceleration Feedback Configuration (Value 4)
You can configure the load observer feature in a variety of ways by writing to a
set of configuration IDN parameters. The overall behavior of load observer is
controlled by Load Observer Configuration (IDN P-431). This parameter is
used to select the Load Observer mode. Use it to set the IDN values listed in
Table 125
on page 238
Remaining IDN Parameter Descriptions
Load observer gains that require user interaction are Load Observer
Bandwidth (Kop) and Load Observer Integral Bandwidth (Koi). They are set
by IDN P-432 and IDN P-433, respectively. Guidelines for setting these gains
are provided in the following sections. In general, Kop acts like a velocity
integrator without windup and Koi acts a like a position integrator without
windup. Typically, Koi = 0.
Figure 120 - Load Observer Gains
Load observer gains that do not require user interaction are Load Observer
Feedback Gain (Kof ) and the Load Observer Input Gain (Kou). They are
automatically set internally based on the Load Observer Configuration.
However, when in Acceleration Feedback mode, Kof can also be set manually
by IDN P-434 with typical values between zero and one.
Velocity Estimate
Torque Estimate
Servo Drive
Mechanics
Unloaded Motor
Position
Command
Control Loops
Power Conversion
Acceleration Reference
Torque Load
Fs
Load Observer
Position Feedback
–
–
Kof
Kjm
1
s
Kou
1
s
Koi
FIR
Δ
Kop
Torque Estimate
Acceleration Estimate
Acceleration Reference
Acceleration Command
Feedback
Position
Feedback
Velocity
Load Observer
Plant
Velocity
Estimate

 Loading...
Loading...

