Integrated Motion on the EtherNet/IP Network
20 Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018
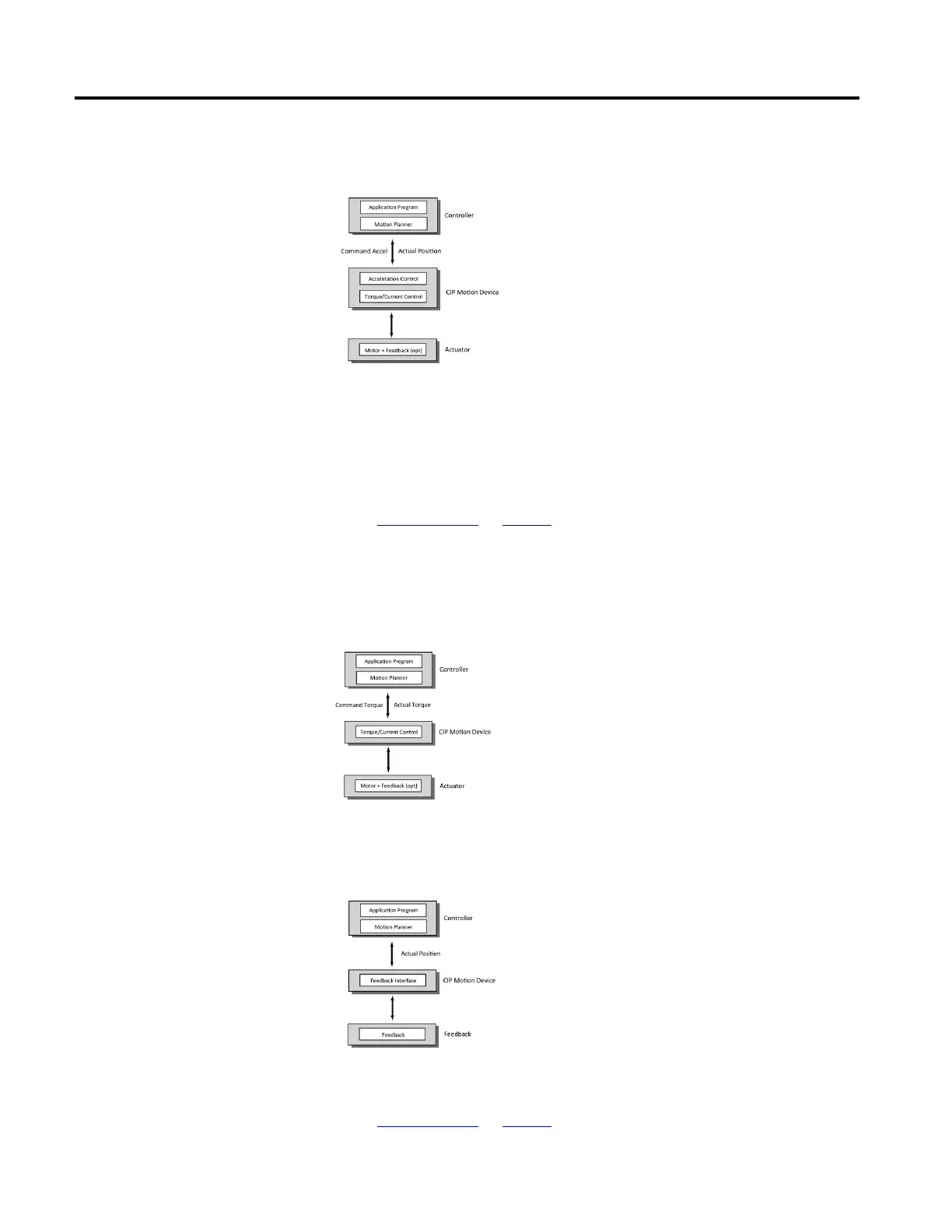
system inertia. Acceleration control works in concert with the inner
torque/current control loop as shown below.
A feedback device for the acceleration control configuration is mandatory and may
be used to return actual position, velocity, and acceleration data to the controller
using the cyclic data connection.
See also
Control Modes on page 16
In Torque Control application mode, the application control program or the
motion planner provide torque setpoint values to the device using the cyclic data
connection. Because motor current and motor torque are generally related by a
torque constant, Kt, torque control is often synonymous with current control.
A position feedback device for this control mode is optional. If a feedback device is
present it can be used to return actual position, velocity, and acceleration data to
the controller using the cyclic data connection.
See also
Control Modes on page 16

 Loading...
Loading...


