Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018 201
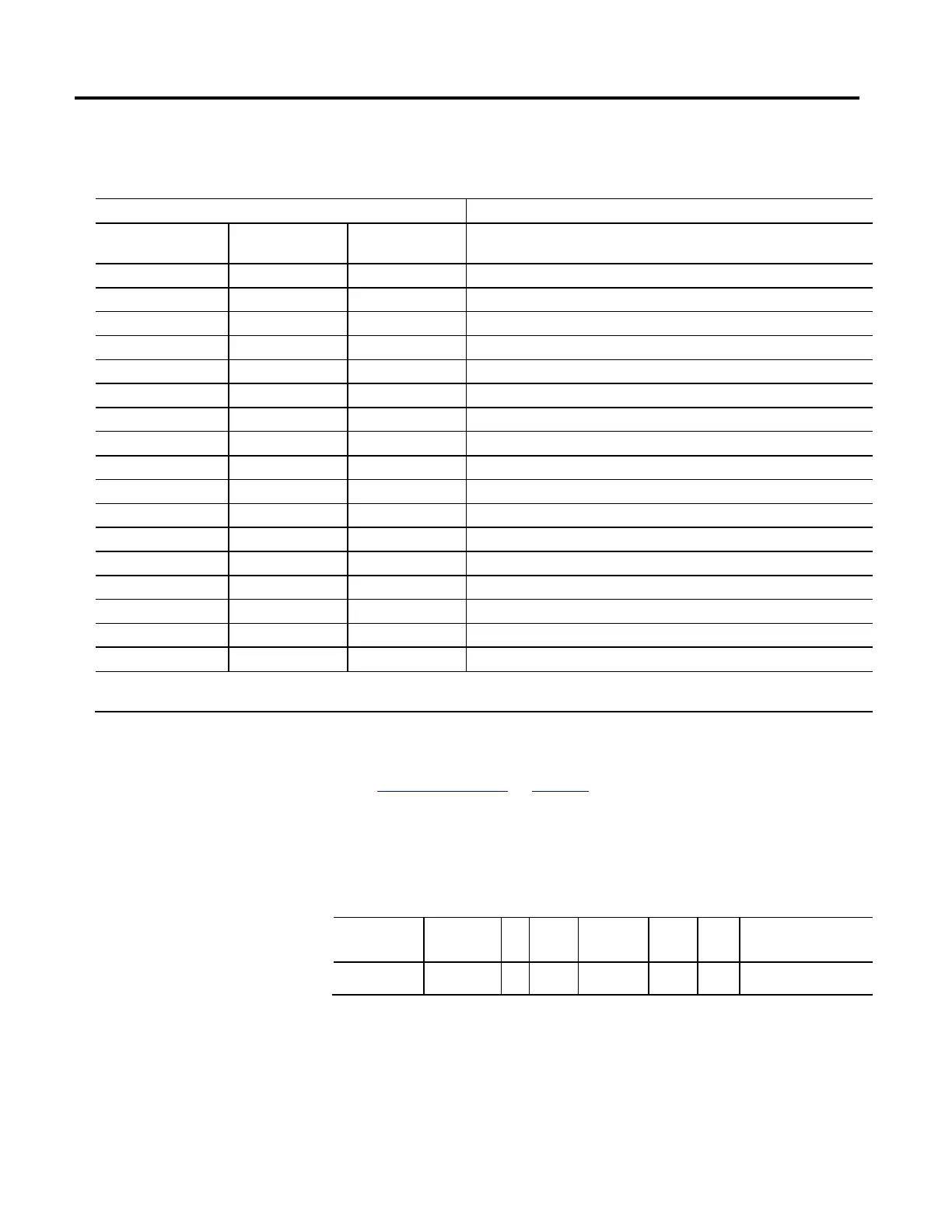
The following table correlates the default commutation alignment with the valid
commutation alignment selections.
Default Commutation Alignment Valid Commutation Alignment Selections
Feedback Type Factory Aligned - True Factory Aligned - False
Digital AqB - Self-Sense* Not Aligned | Self-Sense
Digital AqB with UVW Database Offset Not Aligned Not Aligned | Database Offset | Controller Offset | Self-Sense
Digital Parallel Database Offset Not Aligned Not Aligned | Database Offset | Controller Offset
Sine/Cosine - Self-Sense* Not Aligned | Self-Sense
Sine/Cosine with UVW Database Offset Not Aligned Not Aligned | Database Offset | Controller Offset | Self-Sense
Hiperface Motor Offset* Not Aligned Not Aligned | Database Offset | Controller Offset | Motor Offset | Self-Sense
EnDat Sine/Cosine Motor Offset* Not Aligned Not Aligned | Database Offset | Controller Offset | Motor Offset | Self-Sense
EnDat Digital Motor Offset* Not Aligned Not Aligned | Database Offset | Controller Offset | Motor Offset
Resolver Database Offset Not Aligned Not Aligned | Database Offset | Controller Offset
SSI Digital Database Offset Not Aligned Not Aligned | Database Offset | Controller Offset
Hiperface DSL Motor Offset* Not Aligned Not Aligned | Database Offset | Controller Offset | Motor Offset
BiSS Digital Motor Offset* Not Aligned Not Aligned | Database Offset | Controller Offset
SSI Sine/Cosine Database Offset Not Aligned Not Aligned | Database Offset | Controller Offset | Self-Sense
SSI AqB Database Offset Not Aligned Not Aligned | Database Offset | Controller Offset | Self-Sense
BiSS Sine/Cosine Database Offset Not Aligned Not Aligned | Database Offset | Controller Offset | Self-Sense
Tamagawa Serial Motor Offset* Not Aligned Not Aligned | Database Offset | Controller Offset | Motor Offset
Stahl SSI Database Offset Not Aligned Not Aligned | Database Offset | Controller Offset
* If optional Commutation Alignment enumerations Self-Sense and Motor Offset are not supported by the drive, the create time default Commutation Alignment of Not Aligned is
retained.
See also
CIP Axis Attributes on page 185
These are the current control signal related attributes associated with a Motion
Control Axis.
Current Command
Usage Access T Data
Type
Default Min Max Semantics of Values
Required - C Get/GSV T REAL - - - % Motor Rated
The Current Command attribute represents the instantaneous value of the
commanded torque producing current signal, Iq, prior to passing through the
vector current limiter. It is tied directly to the output of torque reference path
after the 1/Kt scaling that represents the torque effort to be applied to the drive's
torque producing Iq current loop. The nominal value for 1/Kt is 1 based on 100%
rated torque being produced by 100% rated current.
Attributes

 Loading...
Loading...


