Behavior models used in CIP Motion
Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018 55
Tip:
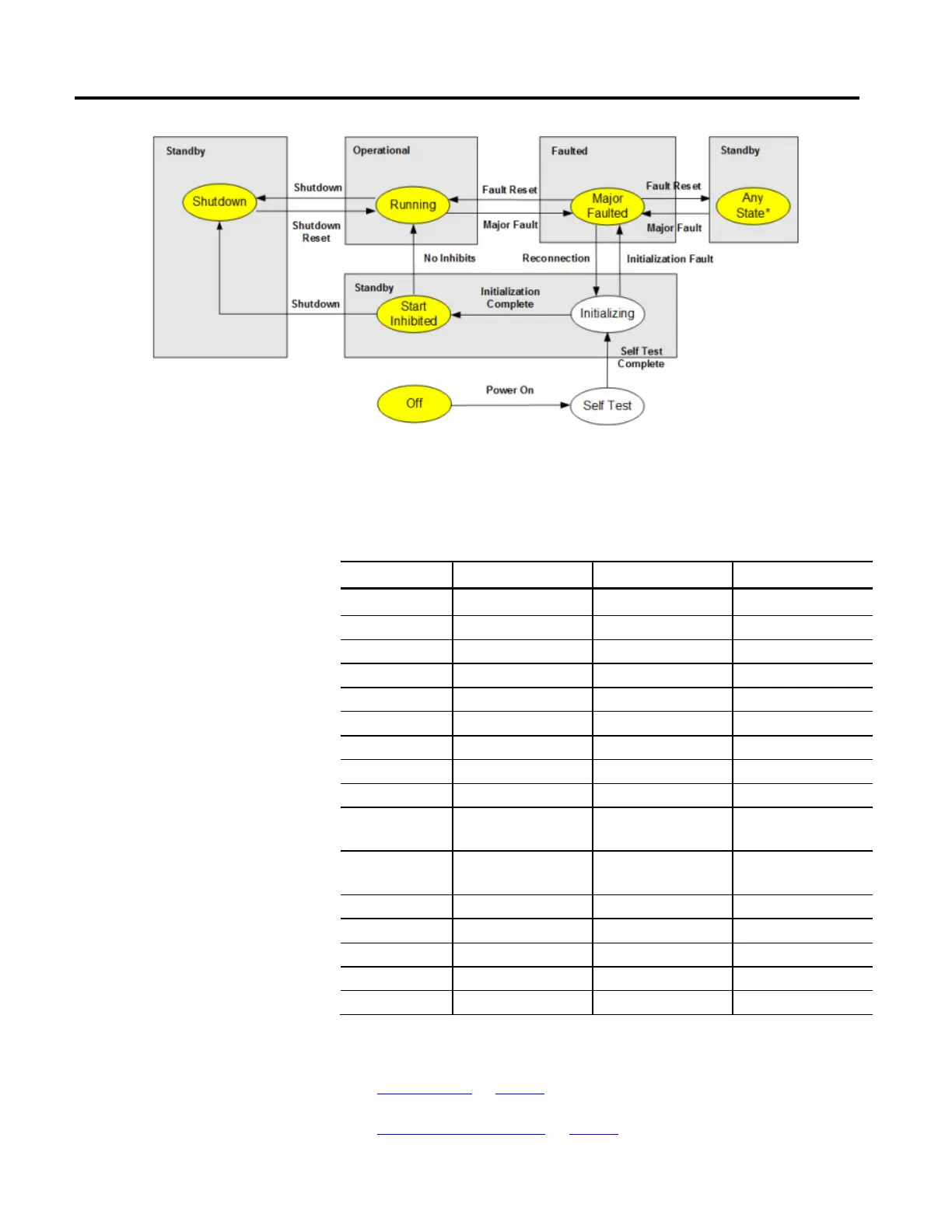
*Specific Standby state after a fault reset is determined by applying Fault Reset State
Transition Precedence rules.
Valid transitions for the Axis State Model of a Feedback Only axis or CIP Motion
Encoder are defined in the following table:
Current State Event Conditions Next State
Off Power Up
Self Test
Initializing Initialization Fault
Major Faulted
Initializing Initialization Complete
Start Inhibited
Shutdown Major Fault
Major Faulted
Shutdown Shutdown Reset
Running
Start Inhibited Shutdown
Shutdown
Start Inhibited Major Fault
Major Faulted
Start Inhibited Inhibits Cleared
Running
Major Faulted Fault Reset Shutdown = 1 Shutdown
Major Faulted Fault Reset Shutdown = 0
Start Inhibited > 0
Start Inhibited
Major Faulted Fault Reset Shutdown = 0
Start Inhibited = 0
Running
Major Faulted Reconnection
Initializing
Running Shutdown
Shutdown
Running Major Fault
Major Faulted
Any State Connection Close
Initializing
Any State Connection Loss
Major Faulted
See also
State Behavior on page 61
Fault and Alarm Behavior on page 41

 Loading...
Loading...


