Velocity - Controller Structure
Function description 87
Version: 1.5
Functionality from firmware v2.10
From firmware v2.10, in addition to a third-order
observer („Basic mode“), a fifth-order observer
("Advanced mode") is available for special
applications.
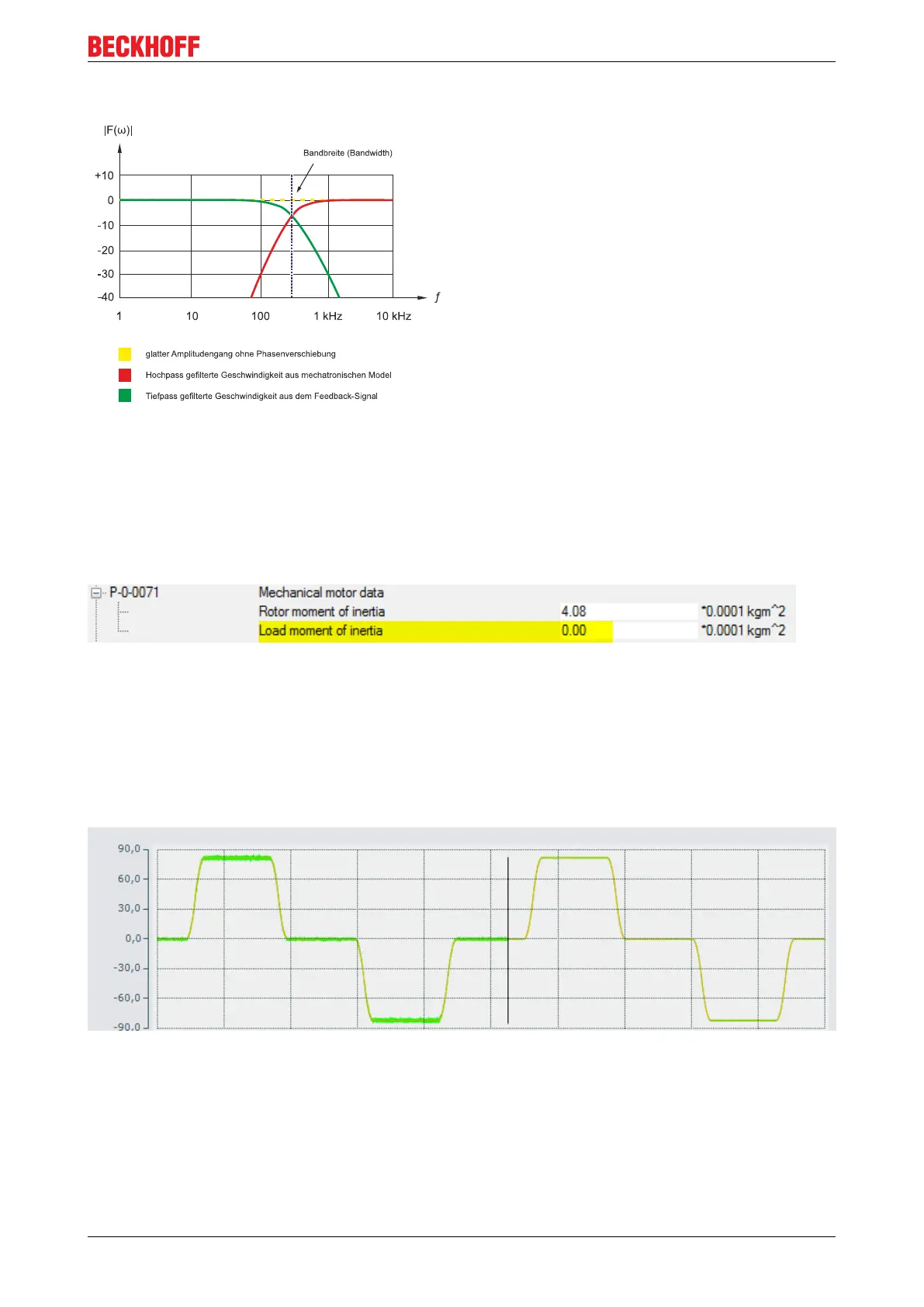
In Basic mode the position signal calculated from the
velocity signal is attenuated with 20 dB / decade
above the bandwidth. In Advanced mode attenuation
takes place with
60 dB / decade.
Both versions, Basic and Advanced, operate with the
cycle of the velocity controller
(default setting 16 kHz).
20.1.5.1 Prerequisites for the operation
Since the Velocity Observer estimates the axis acceleration from the current, it needs the value of the
moment of inertia. This motor value is entered in parameter P-0-0071 or P-0-0127 (only for linear motors)
when the motor is selected.
The value for the load must be added there:
If the correct value is unknown, it should be estimated. Common values for the moment of inertia ratio
between load and motor are in the range 3 - 10.
20.1.5.2 Adjustment procedure
For most applications it is beneficial to use the Velocity Observer in basic mode. The bandwidth should be
left at the default value of 500 Hz. The diagram below illustrates the effect of activating the Velocity Observer
with the default settings in the oscilloscope:
The recording originates from a linear axis with ball screw. The green line shows the actual velocity in mm/s.
The Observer was activated at the black vertical line.

 Loading...
Loading...



