112 | © Danfoss | August 2018 AQ00000211
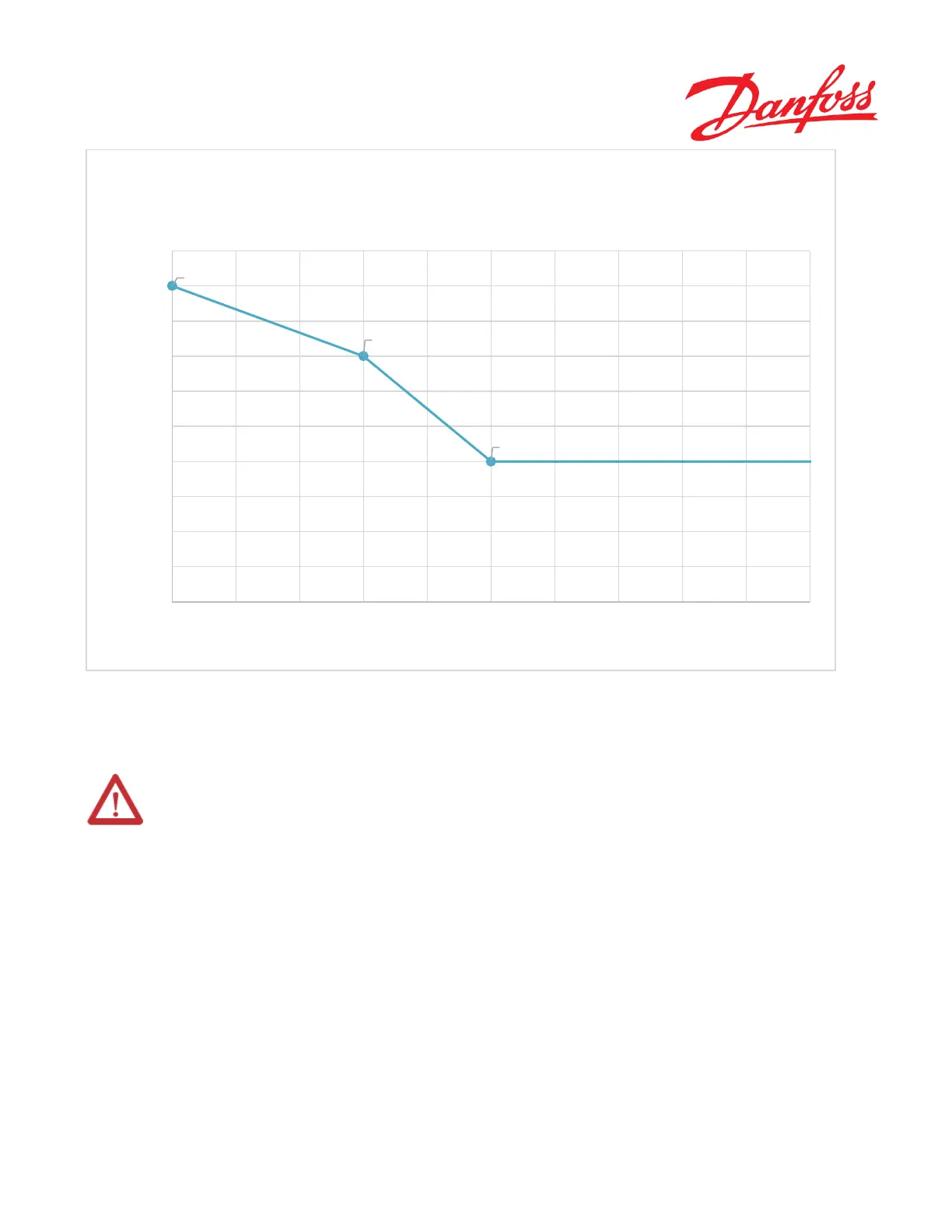
Figure 58
Warning
Failure to comply with the above rules may render this function inoperable or lead to undesirable steering
behavior!
After a desired max wheel angle has been found by the PVED-CLS, in terms of the vehicle speed, the PVED-CLS will
scale and interpolate to that max wheel angle, see example in Figure .
Point A
Point B
Point C
0
5
10
15
20
25
30
35
40
45
50
0 5 10 15 20 25 30 35 40 45 50
AUX - closed loop joystick vehicle speed
dependent wheel angle limitation
Max wheel angle [degrees]

 Loading...
Loading...









